Дмитрий, ваши видео стали для меня спасением в изучении радиотехники!
Я решил обратиться к вам, может вы подскажете или снимите видео. На основе ваших видео я начал разрабатывать схему генератора синусоидальной волны с переменной частотой от 0 до 20 кГц. С треугольным осциллятором все понятно, а вот с синусоидальным (который определяет сигнал) мне показалось сложнее. Чипы либо не могут выдать нужную частоту, сигнал слабый или сильно искаженный. Есть ли какое-нибудь решение этой проблемы?
Спасибо!
Что такое ШИМ – широтно-импульсная модуляция?
Давайте рассмотрим, что такое ШИМ или PWM. Также, в чем разница между ШИМ и ШИМ. Широтно-импульсная модуляция (ШИМ) – это алгоритм, используемый для плавного изменения мощности, подаваемой на нагрузку от источника питания. Например, для управления скоростью вращения вала двигателя; для плавного изменения яркости освещения или подсветки. Отдельной, широкой областью применения ШИМ являются импульсные источники питания и автономные инверторы.
Для питания нагрузки часто необходимо изменять напряжение, подаваемое от источника питания. В принципе, можно выделить два метода регулирования напряжения – линейный и импульсный.

Примером линейного метода является переменный резистор. В этом методе большая часть мощности теряется в резисторе. Чем больше разница напряжения между источником питания и нагрузкой, тем больше потери мощности, которая просто “сгорает” в резисторе и преобразуется в тепло. Поэтому использовать линейный метод регулирования имеет смысл только в том случае, если разница между входным и выходным напряжением невелика. В противном случае общая эффективность источника питания будет очень низкой.

Современные технологии преобразования в основном используют импульсное управление мощностью на нагрузке. Одним из способов реализации импульсного управления является ШИМ широтно-импульсная модуляция. В английской литературе ШИМ – широтно-импульсная модуляция.

Я хочу сказать, что вам не нужно нервничать. По какой-то причине год назад никто не говорил о ШИМ, а теперь СМИ пытаются раздуть из этого проблему. Объяснение простое – чем больше шумихи вокруг темы, тем больше просмотров. Математика довольно проста.
Что такое ШИМ и как она влияет на здоровье
Если верить статистике, в среднем каждый из нас берет в руки смартфон и запускает его экран около 90 раз в день, используя его в общей сложности более 3 часов. Однако я лично более чем уверен, что реальные цифры для многих гораздо выше – особенно для тех, кто связан с новыми технологиями на работе. Лично я просматриваю новости по меньшей мере полтора часа каждое утро и трачу еще час на их чтение в течение дня. Если добавить к этому обмен мгновенными сообщениями, социальные сети и другие виды деятельности, то общее время становится в разы больше.
Учитывая, что мы так тесно взаимодействуем с мобильными устройствами, качество их экранов должно быть максимально высоким. Многие из нас убеждены, что необходимый нам уровень обеспечат дисплеи на базе передовой технологии OLED, обладающие глубочайшим черным цветом, высочайшей яркостью, разрешением и количеством точек на квадратный дюйм. Однако большинство из них ведут себя достойно только при максимальной яркости. Когда вы его выключаете, все идет уже не так гладко.

Дело в том, что, уменьшая яркость подсветки экрана, вы часто также уменьшаете коэффициент мерцания. В данном случае мы имеем дело с технологией широтно-импульсной модуляции, которую часто сокращенно называют ШИМ. Опустим сложные нюансы и обсудим основные принципы его работы.
Абсолютно все цифровые сигналы могут иметь два логических уровня, которые условно можно назвать “включено” и “выключено”, единица и ноль, активное и неактивное напряжение. Если есть желание получить некое среднее значение, как в случае аналоговых сигналов, то необходимо использовать модуляцию. Это предполагает периодическое включение и выключение сигнала, создавая впечатление, что он работает не на полную мощность. Например, если вам нужна подсветка 40%, то 40% времени она будет включена, а 60% времени – выключена. Поскольку напряжение включается и выключается с высокой частотой, человеческий мозг усредняет эти значения и действительно создает впечатление, что используется некий средний уровень яркости. Однако не все воспринимают это безболезненно. Многие люди действительно испытывают головную боль, “хлопают” глазами и чувствуют дискомфорт при использовании гаджета.

Чем выше частота этого мерцания, тем легче его заметить. Производители современных смартфонов прекрасно знают об этом, но не все готовы тратить дополнительные средства для достижения необходимых показателей. Такова реальность сегодняшнего рынка.
- Нет необходимости устанавливать вывод ШИМ как выход через pinMode(), так как это уже встроено в analogWrite() (код ядра, строка
Arduino и ШИМ
В уроке по функциям синхронизации я говорил, что в микроконтроллере есть так называемые счетчики, которые считают “удары” от часов (кварца). Эти счетчики точно генерируют ШИМ-сигнал, т.е. вычислительное ядро самого микроконтроллера не задействовано. Помимо вычислений, на плечи счетчика ложится даже выходной сигнал с ноги MCU. Это очень важно понимать, поскольку сигнал ШИМ не замедляет выполнение кода, так как он буквально генерируется “другой частью оборудования”. На платах UNO/Nano/Pro Mini у нас есть три таймера, каждый таймер имеет два выхода на выводы MCU, таким образом, у нас есть 2*3=6 выводов, способных генерировать ШИМ-сигнал. Для генерации ШИМ у нас есть функция analogWrite(pin, duty)
- вывод – это вывод, который является выходом таймера. Для Nano/Uno это контакты D3, D5, D6, D9, D10, D11. На некоторых платах они помечены звездочкой *, но в целом, чтобы определить контакты ШИМ на любой другой модели Arduino, просто загуглите распиновку.
- duty – занятый ШИМ-сигнал. По умолчанию все наши “выходы” ШИМ являются 8-битными, что означает, что они могут принимать значения с “разрешением” 8 бит, или 0-255.
Давайте объединим эти знания с предыдущим уроком и попробуем изменить яркость светодиода, подключенного через резистор к выводу D3. Потенциометр подключен к контакту A0
Предупреждение:
- Нет необходимости устанавливать вывод ШИМ как выход через pinMode(), так как это уже встроено в analogWrite() (код ядра, строка
В приведенном выше примере яркость светодиода изменяется в зависимости от положения ручки потенциометра. Несколько слов о “стандартном” ШИМ-сигнале – мы получаем его с настройками, предоставляемыми библиотекой Arduino.h, и эти настройки очень малы по сравнению с возможностями Arduino. Мы поговорим об “улучшении” ШИМ позже, а пока давайте рассмотрим характеристики ШИМ “из коробки”:
| Таймер | Pin | Частота | Разрешение |
| Таймер 0 | D5 и D6 | 976 Гц | 8 бит (0-255) |
| Таймер 1 | D9 и D10 | 488 Гц | 8 бит (0-255) |
| Таймер 2 | D3 и D11 | 488 Гц | 8 бит (0-255) |
Это очень неутешительные данные, особенно в отношении частоты. Все таймеры даны под одну гребенку, поэтому пользователю не придется гадать и изучать ненужную документацию. Мы вернемся к изменению частоты и скорости ШИМ в отдельном уроке, а пока вы можете посмотреть этот урок в видеоверсии.
Гуру электроники используют механическую аналогию, когда говорят о ШИМ. Если тяжелый маховик вращается двигателем, то, поскольку этот двигатель можно включить или выключить, маховик либо отпрянет и продолжит вращаться, либо остановится из-за трения, когда двигатель будет выключен.
Широтно-импульсная модуляция
ШИМ (широтно-импульсная модуляция) – это метод управления подачей мощности на нагрузку. Он управляется путем изменения ширины импульса при фиксированной частоте повторения импульсов. Широтно-импульсная модуляция может быть аналоговой, цифровой, двоичной и троичной.
Использование широтно-импульсной модуляции позволяет повысить эффективность электрических преобразователей, особенно импульсных, которые составляют основу вторичного электропитания различных современных электронных устройств. Обратные и прямые push-pull, push-pull, полумостовые и мостовые преобразователи теперь управляются с помощью ШИМ, и это также относится к резонансным преобразователям.
Широтно-импульсная модуляция позволяет регулировать яркость подсветки ЖК-дисплеев в мобильных телефонах, смартфонах, ноутбуках. ШИМ используется в сварочных аппаратах, автомобильных инверторах, зарядных устройствах и т.д. Сегодня каждое зарядное устройство использует ШИМ в своей работе.
Биполярные и полевые транзисторы используются в качестве переключающих элементов в современных высокочастотных инверторах. Это означает, что транзистор полностью открыт в течение части периода и полностью закрыт в течение части периода.
А поскольку в переходном состоянии, которое длится всего несколько десятков наносекунд, мощность, рассеиваемая на ключе, мала по сравнению с мощностью переключения, средняя мощность, рассеиваемая в виде тепла на ключе, в конечном итоге ничтожна. Таким образом, в закрытом состоянии сопротивление транзистора как переключателя очень мало, и падение напряжения на нем близко к нулю.
С другой стороны, в открытом состоянии проводимость транзистора близка к нулю, и через него практически не течет ток. Это позволяет создавать компактные преобразователи с высоким КПД, т.е. с низкими потерями тепла. Резонансные преобразователи с нулевой коммутацией тока (ZCS) позволяют минимизировать эти потери.
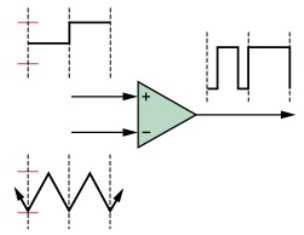
В ШИМ-генераторах аналогового типа управляющий сигнал формируется аналоговым компаратором, когда, например, треугольный или пилообразный сигнал подается на инвертирующий вход компаратора, а модулированный непрерывный сигнал подается на неинвертирующий вход.
Выходные импульсы имеют прямоугольную форму с частотой, равной пилообразной (или треугольной) частоте, а длительность положительной части импульса связана со временем, когда модулирующий сигнал постоянного тока, поданный на неинвертирующий вход компаратора, выше пилообразного сигнала, поданного на инвертирующий вход. Когда пилообразное напряжение выше модулирующего сигнала, на выходе появляется отрицательная часть импульса.
Если на неинвертирующий вход компаратора подается пилообразный цикл, а на инвертирующий вход – модулирующий сигнал, то выходные прямоугольные импульсы будут положительными, когда пилообразное напряжение выше модулирующего сигнала, поданного на инвертирующий вход, и отрицательными, когда пилообразное напряжение ниже модулирующего сигнала. Примером аналогового ШИМ-формирования является схема TL494, которая в настоящее время широко используется в импульсных источниках питания.
Цифровой ШИМ используется с двоичной цифровой технологией. Выходные импульсы также принимают только одно из двух значений (включен или выключен), а средний уровень выходного сигнала близок к желаемому значению. Здесь пилообразный сигнал получается с помощью N-битного счетчика.
Цифровые ШИМ-устройства также работают на фиксированной частоте, которая обязательно превышает время отклика управляемого устройства, такой подход называется передискретизацией. Между фронтами тактовых импульсов цифровой выход ШИМ остается стабильным, либо высоким, либо низким, в зависимости от текущего состояния выхода цифрового компаратора, который сравнивает уровни сигналов на счетчике и приближающемся цифровом.
Выход тактируется как последовательность импульсов с состояниями 1 и 0, в каждом такте состояние может быть изменено на противоположное или нет. Частота импульсов пропорциональна уровню сигнала приближения, и эти последовательные импульсы могут образовывать один более широкий и длинный импульс.
Результирующие импульсы переменной ширины будут кратны тактовому периоду, а частота будет 1/2NT, где T – тактовый период, N – количество тактов. Достижима более низкая частота по отношению к тактовой частоте. Описанная схема цифрового колебания представляет собой однобитную или двухуровневую ШИМ, импульсно-кодовую ИМС-модуляцию.
Двухуровневая импульсно-кодовая модуляция представляет собой серию импульсов с частотой 1/T и шириной T или 0. Передискретизация используется для усреднения за более длительный период времени. Высокое качество ШИМ может быть достигнуто с помощью однобитной модуляции плотности импульсов, также известной как частотно-импульсная модуляция.
В случае цифровой широтно-импульсной модуляции квадратные импульсы, заполняющие период, могут возникать в любом месте периода, и только количество импульсов влияет на среднее значение сигнала за период. Таким образом, если разделить период на 8 частей, то комбинации импульсов 11001100, 11110000, 11000101, 10101010 и т.д. дадут одинаковое среднее значение за период, тем не менее, отдельные импульсы утяжелят режим работы ключевого транзистора.

Говоря о ШИМ, инженеры-электронщики используют механическую аналогию. Если тяжелый маховик вращается с помощью двигателя, то, поскольку двигатель можно включать и выключать, маховик будет либо вращаться и продолжать вращаться, либо остановится из-за трения при выключении двигателя.
Однако, если двигатель включается на несколько секунд в минуту, вращение маховика будет поддерживаться по инерции на определенной скорости. И чем дольше включен двигатель, тем выше частота вращения маховика. Как и в случае с ШИМ, на выход подается сигнал включения и выключения (0 и 1), а затем получается среднее значение. Интегрируя импульсное напряжение по времени, получают площадь под импульсами, а воздействие на рабочий орган идентично воздействию при работе со средним значением напряжения.
Именно так работают инверторы, в которых переключение происходит тысячи раз в секунду, а частота достигает единиц мегагерц. Специальные ШИМ-контроллеры широко используются для управления балластами энергосберегающих ламп, источниками питания, преобразователями частоты двигателей и т.д.
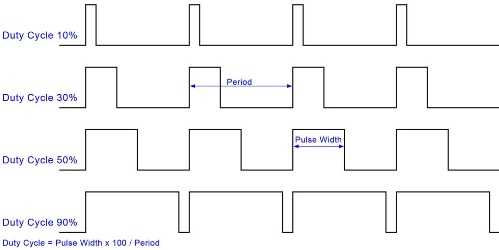
Отношение общего периода импульса к времени включения (положительная часть импульса) называется рабочим циклом импульса. Так, если время включения составляет 10 мкс, а период – 100 мкс, то при частоте 10 кГц рабочий цикл будет равен 10, поэтому S = 10. Обратная величина рабочего цикла называется рабочим циклом импульса, или сокращенно DC.
Так, в приведенном примере DC = 0,1, потому что 10/100 = 0,1. В случае широтно-импульсной модуляции, регулируя рабочий цикл импульса, т.е. изменяя постоянный ток, можно управлять выходом электронного устройства или другого электрического устройства, например, двигателя, до среднего значения.
Если вам понравилась эта статья, пожалуйста, поделитесь ею в социальных сетях. Это очень поможет в развитии нашего сайта!
Использование ШИМ также может повысить эффективность электрических инверторов. Это еще более справедливо для повышающих преобразователей, которые в настоящее время в основном используются во вторичном питании различных электронных устройств. Коммутирующие преобразователи бывают реверсивными, push-pull, push-pull 1-тактными, push-pull 2-тактными, полумостовыми, резонансными и управляются с помощью ШИМ.
В чем разница между shim и schir?
На Западе практически нет разницы между терминами ШИМ и ШИМ-управление. Однако у нас есть некоторое различие между этими двумя понятиями. Многие ИС реализуют принцип ШИМ, но их все равно называют ШИМ-контроллерами. Поэтому разницы в их названиях практически нет.
Единственное различие между ШИМ и ШИМ заключается в том, что при ШИМ время импульса и прерывания фиксировано. В случае ШИМ их длительность меняется, что позволяет генерировать выходной сигнал ШИМ определенной формы.
ШИМ дает очень простую возможность уменьшать напряжение в диапазоне от напряжения питания U1 до 0. Это можно использовать, например, для управления яркостью светодиодов или скоростью двигателя постоянного тока (DC), питающегося от среднего значения напряжения.
Расчет коэффициента заполнения ШИМ
Расчет коэффициента заполнения ШИМ на примере:
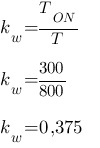
Чтобы рассчитать процентный коэффициент заполнения, выполните аналогичный расчет и умножьте результат на 100%:

Как показывает расчет, в данном примере сигнал (высокий уровень) имеет коэффициент заполнения 0,357 или, иначе, 37,5%. Коэффициент заполнения – это абстрактная величина.
Важной характеристикой широтно-импульсной модуляции может быть также частота сигнала, которая рассчитывается по формуле:
Значение T в нашем примере уже должно быть взято в секундах, чтобы соответствовать единицам измерения в формуле. Поскольку формула для частоты равна 1/сек, мы преобразуем 800 мс в 0,8 сек.
Регулируя ширину импульса, можно изменять, например, среднее значение напряжения. На следующей иллюстрации показаны различные коэффициенты заполнения при сохранении одинаковой частоты и амплитуды сигнала.
Для расчета среднего значения напряжения ШИМ необходимо знать коэффициент заполнения, поскольку среднее значение напряжения является произведением коэффициента заполнения и амплитуды напряжения сигнала.
Например, коэффициент заполнения составил 37,5% (0,357), а амплитуда напряжения U1 = 12В дала среднее напряжение Ucp:
В этом случае среднее напряжение ШИМ-сигнала составляет 4,5 В.
ШИМ дает очень простой способ уменьшения напряжения от напряжения питания U1 до 0. Это можно использовать, например, для управления яркостью светодиодов или скоростью двигателя постоянного тока (DC), питаемого средним напряжением.
ШИМ-сигнал может генерироваться микроконтроллером или аналоговой схемой. Сигнал от таких схем характеризуется низким напряжением и очень низким выходным током. Если необходимо управлять большими нагрузками, следует использовать схему управления, например, транзистор.
Это может быть биполярный транзистор или полевой транзистор. В следующих примерах будет использоваться биполярный транзистор BC547.
Пример управления светодиодом с помощью ШИМ.
ШИМ-сигнал подается на базу транзистора VT1 через резистор R1, другими словами, транзистор VT1 включается и выключается с изменением сигнала. Это похоже на ситуацию, когда транзистор можно заменить простым переключателем, как показано ниже:
Упрощенная схема управления светодиодами.
Когда выключатель замкнут, на светодиод через резистор R2 (токоограничивающий резистор) подается напряжение 12 В. Когда переключатель разомкнут, цепь разрывается, и светодиод гаснет. Это низкочастотное переключение заставит светодиод мигать.
Однако, если необходимо регулировать интенсивность светодиода, частота ШИМ-сигнала должна быть увеличена, чтобы обмануть человеческий глаз. Теоретически, частота переключения 50 Гц уже не является незаметной для человеческого глаза, что приводит к более тусклому эффекту свечения светодиодов.
Чем ниже коэффициент заполнения, тем слабее будет светиться светодиод, поскольку он будет гореть более короткий период времени.
Тот же принцип и аналогичная схема могут быть использованы для управления двигателем постоянного тока. Однако более высокая частота коммутации (выше 15-20 кГц) должна использоваться с двигателем по двум причинам.
Первый связан со звуком, который может издавать двигатель (неприятный визг). Частота 15-20 кГц является теоретическим пределом слышимости для человеческого уха, поэтому частоты выше этого предела не будут слышны.
Второй вопрос касается стабильности работы двигателя. Если двигатель управляется низкочастотным сигналом с низким коэффициентом заполнения, скорость вращения двигателя будет нестабильной или может привести к полной остановке двигателя. Поэтому, чем выше частота сигнала ШИМ, тем выше стабильность среднего выходного напряжения. Пульсации напряжения также ниже.
Однако частота ШИМ-сигнала не должна быть слишком высокой, поскольку при более высокой частоте транзистор может не успеть полностью открыться или закрыться, и система управления не будет работать должным образом. Это особенно актуально для полевых транзисторов, где время зарядки может быть относительно большим, в зависимости от конструкции.
Слишком высокая частота сигнала ШИМ также увеличивает потери в транзисторах, поскольку каждое переключение вызывает потерю энергии. При управлении большими токами на высоких частотах необходимо выбрать быстрый транзистор с низким сопротивлением проводимости.
При управлении двигателем постоянного тока с помощью ШИМ не забудьте использовать диод для защиты транзистора VT1 от скачков индуктивности, возникающих при выключении транзистора. При использовании диода индуктивный импульс рассеивается им и внутренним сопротивлением двигателя, тем самым защищая транзистор.
Схема системы управления скоростью двигателя постоянного тока с защитным диодом.
Чтобы сгладить скачки напряжения между клеммами двигателя, параллельно можно подключить небольшой конденсатор (100nF) для стабилизации напряжения между транзисторными ключами. Это также уменьшит шум, создаваемый частым переключением транзистора VT1.
Читайте далее:- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Принцип работы транзисторов Мосфета.
- Биполярные транзисторы.
- Разница между аналоговыми и цифровыми сигналами.
- Правильное переключение светодиодов; STC ORBITA.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Компьютерная обработка изображений.