Для детального анализа параметров двигателя определяется зависимость, показанная на графике выше.
Характеристики скольжения асинхронного двигателя: описание и определение, способы измерения

Одним из наиболее важных параметров асинхронного двигателя является скольжение. Это переменная величина. Он может меняться в зависимости от режимов работы двигателя, значений напряжения, общей нагрузки.
В этой статье мы рассмотрим, что это за явление, как оно рассчитывается, от каких условий зависит.
Критическое скольжение определяется как отношение сопротивления ротора к эквивалентному сопротивлению (на основе активного сопротивления статора и индуктивного сопротивления статора и диссипации ротора).
Скольжение асинхронного двигателя
 Взаимодействие магнитного поля с токами в роторе асинхронного двигателя создает электрический момент, который стремится уравнять скорость вращения магнитных полей статора и ротора.
Взаимодействие магнитного поля с токами в роторе асинхронного двигателя создает электрический момент, который стремится уравнять скорость вращения магнитных полей статора и ротора.
Разность скоростей магнитных полей статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 – n 2 ) / n 2, где n 1 – частота вращения синхронного поля, об/мин, n2 – частота вращения ротора асинхронного двигателя, об/мин. При номинальной нагрузке скольжение обычно недостаточно, поэтому, например, для электродвигателя с n 1 = 1 500 об/мин, n2 = 1 460 об/мин, скольжение составляет: s = ((1 500 – 1 460) / 1 500 ) x 100 = 2,7%.
Асинхронный двигатель не может достичь синхронной скорости даже в трех отключенных механизмах, потому что в нем проводники ротора не будут пересекаться магнитным полем, в них не будет индуцированной электродвижущей силы и в них не будет тока. Асинхронный момент при s = 0 будет равен нулю.
 В начальной точке запуска обмотки ротора проводят ток с частотой сети. По мере ускорения ротора частота тока в роторе будет определяться скольжением асинхронного двигателя: f2 = s x f1, где f1 – частота тока, подаваемого на статор.
В начальной точке запуска обмотки ротора проводят ток с частотой сети. По мере ускорения ротора частота тока в роторе будет определяться скольжением асинхронного двигателя: f2 = s x f1, где f1 – частота тока, подаваемого на статор.
Сопротивление ротора является функцией частоты тока в роторе, причем чем больше частота, тем больше индуктивное сопротивление. По мере увеличения индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
Поэтому при запуске асинхронных двигателей коэффициент мощности значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным сопротивлением двигателя и приложенным напряжением.
Значение эквивалентного сопротивления асинхронного двигателя с конфигурацией скольжения изменяется по сложному закону. При уменьшении скольжения от 1 до 0,15 сопротивление обычно увеличивается менее чем в 1,5 раза, от 0,15 до s Ом – в 5-7 раз по сравнению с начальным значением при запуске.
Ток изменяется обратно пропорционально изменению эквивалентного сопротивления. Таким образом, при запуске, вплоть до скольжения 0,15, ток немного уменьшается, а затем быстро миниатюризируется.
Крутящий момент также можно определить по электрической мощности на валу, как отношение этой мощности к угловой скорости ротора. Значение крутящего момента пропорционально квадрату напряжения и обратно пропорционально квадрату частоты.
 Соответствующие значения крутящего момента в зависимости от скольжения (или скорости) – это начальное значение крутящего момента (когда двигатель неподвижен), наибольшее значение крутящего момента (и соответствующее скольжение, называемое критическим скольжением) и наименьшее значение крутящего момента в диапазоне скоростей от остановки до номинальной скорости.
Соответствующие значения крутящего момента в зависимости от скольжения (или скорости) – это начальное значение крутящего момента (когда двигатель неподвижен), наибольшее значение крутящего момента (и соответствующее скольжение, называемое критическим скольжением) и наименьшее значение крутящего момента в диапазоне скоростей от остановки до номинальной скорости.
Значения крутящего момента для номинальных напряжений можно найти в каталогах электронных машин. Знание низкого крутящего момента необходимо при расчете допустимости запуска или самозапуска полностью загруженной машины. Поэтому его значение для некоторых расчетов должно быть определено или получено от поставщика.
Максимальное значение крутящего момента определяется индуктивным сопротивлением статора и ротора и не зависит от величины сопротивления ротора.
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обоснованному активным сопротивлением статора, индуктивным сопротивлением статора и диссипацией ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и смещением максимального крутящего момента в область более высокого скольжения (наименьшей скорости). Этот метод может быть использован для изменения характеристик крутящего момента.
В асинхронных двигателях с фазным ротором изменение момента при различных скоростях скольжения достигается с помощью резистора, введенного в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто путем внедрения двигателей с регулируемой скоростью или использования преобразователей частоты.
Существует несколько подходов к измерению скольжения в асинхронном двигателе. При значительном отличии рабочей частоты от синхронной частоты S измеряется с помощью тахометра или тахогенератора. Это специальное устройство, соединенное с приводным валом.
Как можно измерить значение S?
Существует несколько методов измерения скольжения в электродвигателе асинхронного типа. Если рабочая частота значительно отличается от синхронной частоты, S измеряется с помощью тахометра или тахогенератора. Это специальное устройство, соединенное с приводным валом.
Стробоскопический метод. В этом методе используется неоновая лампа. Измерения можно проводить только в том случае, если скольжение не превышает пяти процентов. На валу двигателя необходимо провести линию мелком. Вместе с ним может быть установлен стробоскопический диск. Затем на него светят лампой, которая подсчитывает, сколько раз вал совершил оборот за определенный промежуток времени. Окончательные расчеты производятся по специальным формулам. В этом методе допустимо использовать самый популярный стробоскоп. Его пример приведен ниже.
Третий способ поиска скольжения – через индукционную катушку. Как это сделать. Возьмите катушку от электромагнитного реле постоянного тока (контактора). Этот вариант лучше всего, потому что он имеет довольно много витков, около 20 000 витков. А для этих измерений вам нужно не менее 3 000. Подключите к катушке точный милливольтметр (он подходит из-за своей чувствительности). Затем установите катушку там, где заканчивается вал якоря.
Затем подсчитайте количество сделанных колебаний и по специальной формуле определите скольжение.
Кстати, если ротор асинхронного двигателя имеет фазу, S можно рассчитать с помощью магнитоэлектрического амперметра. Устройство подключается к любой из трех фаз якоря, подсчитывает количество колебаний стрелки (за определенный период времени) и вычисляет нужное значение по той же формуле, что и в методе катушки.
ГОСТ Р 53986-2010: Генераторные установки переменного тока с приводом от двигателя внутреннего сгорания. Часть 3: Генераторные установки переменного тока – ГОСТ Р 53986-2010:Генераторные установки переменного тока с приводом от двигателя внутреннего сгорания. Часть 3: Генераторные установки переменного тока с приводом от двигателя внутреннего сгорания. Оригинальный документ: 3.2.9 время восстановления напряжения; tU… Глоссарий технической и проектной документации
Литература
- Хомяков Н.М., Денисов В.В., Панов В.А. Электротехника и электрооборудование судов. – Ленинград: Издательство “Судостроение”, 1971 г. – 368 с.
- Электрические явления (на русском языке).
- Системы управления электродвигателями
Фонд Викимедиа . 2010 .
Полезная страница
Смотреть что такое “Скольжение асинхронного двигателя” в других словарях
Скольжение – Этой статье не хватает введения. Пожалуйста, заполните вводный раздел кратким описанием темы статьи. Скольжение: скольжение (авиация) Тепловое скольжение Скольжение асинхронного двигателя … Википедия
Проскальзывание ротора асинхронного двигателя – Скольжение ротора асинхронного двигателя – [Я.Н.Лугинский, М.С.Феси Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999] Темы электротехника, основные понятия Синонимы скольжение ротора … …Руководство технического переводчика
ГОСТ Р 53986-2010: Генераторные установки переменного тока с приводом от двигателя внутреннего сгорания. Часть 3: Генераторные установки переменного тока – Терминология ГОСТ Р 53986-2010: Генераторные установки переменного тока с приводом от двигателя внутреннего сгорания. Часть 3. 3.2.9 время восстановления напряжения; tU… Глоссарий терминов для проектной и технической документации
ГЕНЕРАТОРЫ И ДВИГАТЕЛИ – Вращающиеся машины, преобразующие механическую энергию в электрическую (генераторы) или электрическую энергию в механическую (двигатели). Работа генераторов основана на принципе электромагнитной индукции: в проводе, движущемся в магнитном поле … Энциклопедия Кольера
Асинхронная машина – Статор и ротор асинхронной машины 0,75 кВт, 1420 об/мин, 50 Гц, 230 400 В, 3,4 2,0 А Асинхронная машина – это электрическое устройство переменного тока … Википедия
Линейный двигатель – Лабораторный синхронный линейный двигатель. На заднем плане – статор в виде ряда индукционных катушек, на переднем плане – подвижная вторичная обмотка, содержащая постоянный магнит … Википедия
Трехфазный двигатель – Трехфазный синхронный двигатель Трехфазный синхронный двигатель – это электродвигатель, предназначенный для питания от трехфазной сети переменного тока. Это машина переменного тока, состоящая из статора с тремя обмотками,… … Википедия
Характеристики – K.4.Характеристики Используются следующие дополнительные характеристики: K.4.3.1.2 Номинальное напряжение изоляции Минимальное номинальное напряжение изоляции должно составлять 250 В. K.4.3.2.1 Номинальный внешний тепловой ток….. Глоссарий нормативной терминологии
Характеристики регулирования напряжения – 3.2.12 Характеристики регулирования напряжения: Кривые выходного напряжения генератора как функция токов нагрузки при заданном коэффициенте мощности при установившемся режиме работы на номинальной скорости без ручного управления.
Более высокое скольжение может быть достигнуто двумя способами: уменьшением индукции за счет увеличения числа витков обмотки в статоре или, что более распространено, использованием обмотки ротора, усиленной специальным сплавом с высоким сопротивлением. Проще говоря, чем выше сопротивление обмотки ротора, тем меньше ток протекает в роторе, и магнитное поле, создаваемое током в этой обмотке, также становится меньше. Это приводит к увеличению скольжения, магнитное поле статора с меньшей вероятностью “поймает” ротор с ослабленным магнитным полем.
Использование двигателей с повышенным скольжением
Основным преимуществом двигателей с удлиненным скольжением является их способность работать при большой нагрузке, неравномерной пульсирующей (ударной) нагрузке и прерывистой работе с частыми пусками и остановками (режимы S2, S3, S4, S6). Стандартный двигатель может перегореть в таких условиях, поскольку он рассчитан на нечастые остановки и пуски. В других случаях эти двигатели практически идентичны стандартным моделям общепромышленных двигателей.
Электродвигатели с повышенным скольжением используются для привода механизмов с пульсирующими нагрузками (например, поршневые компрессоры малой мощности) и ударными нагрузками (молоты, прессы), а также для привода транспортных машин.
Ток изменяется обратно пропорционально изменению последовательного сопротивления, поэтому при запуске, до скольжения около 0,15, ток падает незначительно, а затем быстро уменьшается.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения преобразователей частоты асинхронные двигатели средней и большой мощности выпускались с фазно обмотанным ротором. Трехфазные асинхронные двигатели с фазнозамкнутым ротором (ADFR) обычно использовались в приложениях со сложными условиями запуска, например, в качестве крановых двигателей переменного тока или для привода оборудования, требующего плавного регулирования скорости.
Проектирование АДФР
Фазированный ротор
По своей конструкции фазный ротор представляет собой трехфазную обмотку (аналогичную обмотке статора), расположенную в пазах сердечника фазного ротора. Фазные концы этой обмотки ротора обычно соединены звездой, а начала подключены к контактным кольцам, которые изолированы друг от друга и от вала. Реостат трехфазного пуска или управления обычно подключается к щеткам контактных колец. Асинхронные двигатели с фазированным ротором сложнее, чем двигатели с короткозамкнутым ротором, хотя они имеют лучшие характеристики запуска и управления.
 Ротор с фазной обмоткой
Ротор с фазной обмоткой
Статор ADFR
Статор асинхронного двигателя с короткозамкнутым ротором конструктивно не отличается от статора двигателя с короткозамкнутым ротором.
Обозначение выводов вспомогательной обмотки для трехфазного АДСР
| Схема подключения обмоток, обозначение фаз и выходов | Обозначение выхода | |
|---|---|---|
| Начало | Конец | |
| Разомкнутая цепь (количество проводников 6) | ||
| первый этап | K1 | K2 |
| вторая фаза | L1 | L2 |
| третий этап | M1 | M2 |
| Соединение звездой (количество проводников 3 или 4) | ||
| первый этап | K | |
| вторая фаза | L | |
| третий этап | M | |
| звездная точка (нулевая точка) | Q | |
| Дельта-подключение (количество выводов 3) | ||
| первый вывод | K | |
| второй ведущий | L | |
| третий лид | M | |
| Схема подключения обмоток, маркировка фаз и выводов | Обозначение выхода | |
|---|---|---|
| Соединение звездой (количество выводов 3 или 4) | ||
| первый этап | Р1 | |
| вторая фаза | Р2 | |
| третий этап | Р3 | |
| нулевая точка | ||
| Дельта-подключение (количество выводов 3) | ||
| первый вывод | Р1 | |
| второй ведущий | Р2 | |
| третий лид | Р3 | |
Начало АДПФ
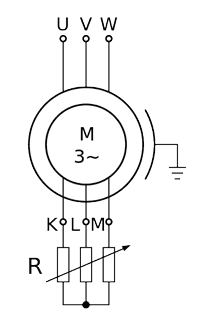
Двигатель с фазным ротором запускается с помощью реостата в цепи ротора.
Используются проволочные реостаты и жидкостные реостаты.
Металлические реостаты ступенчатые, а переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки управления, основным элементом которой является вал с установленными на нем контактами, либо автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат это емкость с электролитом, в которую опускаются электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов [3].
Для повышения эффективности и снижения износа щеток некоторые АДСР включают специальное устройство (механизм короткого замыкания), которое при активации поднимает щетки и замыкает кольца.
При запуске с помощью реостата достигаются благоприятные пусковые характеристики, так как при низких пусковых токах достигаются высокие значения крутящего момента. В настоящее время АДПФ заменяются комбинацией асинхронного двигателя с короткозамкнутым ротором и преобразователя частоты.
Читайте далее:- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Асинхронный электродвигатель – конструкция, принцип работы, типы асинхронных двигателей.
- Принцип работы синхронного двигателя.
- Векторное управление вентильным двигателем в безредукторном сервоприводе – темы научных работ по электротехнике, электронике, информатике читайте бесплатно тексты научных работ в электронной библиотеке КиберЛенинка.
- Типы электродвигателей и их характеристики.