Контроллер – это электрическое устройство с большим количеством контактов для запуска, изменения направления и управления нагрузкой двигателей постоянного и переменного тока. [Словарь строительной терминологии на 12 языках (ВНИИС Госстроя СССР)] Подразделения … Энциклопедия терминов, определений и объяснений строительных материалов
Контроллер
Контроллер (англ. контроллер – Контроллер, устройство управления):
- Контроллер – Устройство управления в электронике или компьютерной технике.
- Игровой контроллер – Устройство ввода, используемое в консольных и компьютерных играх.
- контроллер домена – Сервер, контролирующий область компьютерной сети (домен).
- контроллер прерываний – Интегральная схема или блок, встроенный в процессор, который отвечает за обработку запросов на прерывание от различных устройств.
- Контроллер электродвигателя – Многоступенчатые, многопроводные распределительные устройства с ручным управлением.
- Микроконтроллер – Интегральная схема, управляющая электронными устройствами.
- промышленный контроллер – Устройство управления, используемое в промышленности и других отраслях для автоматизации производственных процессов, для управления климатом в доме и т.д.
- программируемый логический контроллер – Промышленный контроллер, оптимизированный для логических операций.
- системный контроллер – Компонент набора микросхем, который организует взаимодействие между процессором и оперативной памятью для формирования компьютерной платформы.
– Встраиваемые системы – ПЛК установлен отдельно отдельно от оборудования, которым он управляет.

Назначение
ПЛК состоит из блока управления, блоков ввода/вывода и коммуникационных блоков. Наиболее важной частью любого ПЛК является Процессорный модуль. К нему подключаются модули расширения, источники питания и линии связи с дополнительным оборудованием. Помимо вышеуказанных устройств, контроллер может содержать и дополнительные устройства. 5)
В соответствии с заданной программой логический микроконтроллер обрабатывает данные, поступающие от модулей ввода, и посылает управляющие команды на исполнительные механизмы, которые соединены с ПЛК коммуникационными модулями. 6) ПЛК являются устройствами реального времени.
7)Наглядное описание работы ПЛК можно найти в следующем видеоролике на английском языке:
ПЛК имеют ряд особенностей, которые отличают их от других электронных устройств, используемых в промышленности:
– Микроконтроллер (одночиповый компьютер), схема, предназначенная для управления электронными устройствами, областью применения ПЛК обычно является автоматизация промышленных производственных процессов, в контексте производственного предприятия;
– компьютеры, ПЛК имеют расширенные возможности ввода/вывода датчиков и исполнительных механизмов в отличие от скудных возможностей ввода/вывода управляющих устройств (клавиатура, мышь, монитор и т.д.);
– Встраиваемые системы – установлены ПЛК отдельно во встраиваемых системах ПЛК устанавливается отдельно от устройств, которыми он управляет.
В этом видеоролике демонстрируется управление металлорежущим станком с помощью ПЛК:
Известно, что средний ток потребления вычислительного ядра микроконтроллера значительно возрастает при увеличении тактовой частоты микроконтроллера. Первоначально 8-разрядные модели микроконтроллеров обеспечивали гораздо меньшее потребление тока при сопоставимой частоте и могли работать на более низких тактовых частотах, вплоть до 32 кГц.
Разработка электроники. О микроконтроллерах на пальцах
Изобретая технологический стартап, не обязательно быть асом в электронике, у узкого специалиста со знанием основ маркетинга гораздо больше шансов иметь хорошую идею, но даже поручая кому-то ее разработку, нужно знать возможности базы современных компонентов и цену решения. В противном случае вы можете потребовать невозможного или получить слишком дорогое устройство на устаревшей компонентной базе.
Вот краткое и простое объяснение того, как работают современные микроконтроллеры, для тех, кто с ними не знаком. Для тех, у кого есть идея создания нового электронного устройства, но кто не имеет представления о том, что такое микроконтроллер. Те, кто хочет сделать первый шаг от веселых экспериментов с платформой arduino к проектированию собственных устройств, также найдут в этой книге простые, но полезные советы. Я старался не останавливаться на технических деталях,книги для этого тоже недостаточноизложить суть и дать несколько простых, но полезных советов по схеме, чтобы предостеречь от элементарных ошибок новичков.Краткое содержание статьи:
Защита кода, расширяемость и разнообразие помогли микроконтроллерам завоевать мир
Каждое умное устройство нуждается в управлении. В большинстве случаев сегодня это делают микроконтроллеры – чипы, содержащие микропроцессорное ядро, память и периферийные устройства, отвечающие за связь с остальными частями устройства и внешним миром.
 Микроконтроллеры – мастера на все руки. Один микроконтроллер может заменить десятки специализированных микросхем, которые потребовались бы для выполнения необходимых функций, если бы микропроцессором был калькулятор.
Микроконтроллеры – мастера на все руки. Один микроконтроллер может заменить десятки специализированных микросхем, которые потребовались бы для выполнения необходимых функций, если бы микропроцессором был калькулятор.Одним из больших преимуществ микроконтроллера является то, что программа, на основе которой он работает, спрятана внутри корпуса (в части, называемой “памятью программ”) и очень хорошо защищена от взлома, при условии, конечно, что разработчик микрокода позаботился об этом, запустив встроенные механизмы безопасности. Таким образом, вы получаете максимальную защиту интеллектуальной собственности, которая возможна в наши дни.
 То, что нельзя сломать, можно скопировать. Зачем пытаться прочитать код, заложенный в программу микроконтроллера, используя дорогое и сложное оборудование, когда проще и дешевле найти профессионала, который напишет ее с нуля? Возможно, результат будет еще лучше, а функциональность богаче, чем в прототипе. Да, это стоит денег, но содержимое FLASH-памяти в современных микроконтроллерах настолько хорошо защищено, что попытка грубого “взлома” обойдется еще дороже. Это также решает проблему интеллектуальной собственности и дает вам, вместе с исходным кодом программы, возможность развивать и совершенствовать ваше устройство.
То, что нельзя сломать, можно скопировать. Зачем пытаться прочитать код, заложенный в программу микроконтроллера, используя дорогое и сложное оборудование, когда проще и дешевле найти профессионала, который напишет ее с нуля? Возможно, результат будет еще лучше, а функциональность богаче, чем в прототипе. Да, это стоит денег, но содержимое FLASH-памяти в современных микроконтроллерах настолько хорошо защищено, что попытка грубого “взлома” обойдется еще дороже. Это также решает проблему интеллектуальной собственности и дает вам, вместе с исходным кодом программы, возможность развивать и совершенствовать ваше устройство.Память программ в современных универсальных микроконтроллерах является перезаписываемой, и процесс перезаписи может повторяться многие десятки тысяч раз. Этот факт необходимо использовать для обновления программного обеспечения с целью устранения найденных в нем ошибок или расширения функций уже работающего устройства. Сделать это довольно просто – добавив в программное обеспечение специальный участок кода под названием “bootloader”, мы можем обновить ПО нашего устройства различными способами: в сервисном центре (если устройство имеет специальный разъем, спрятанный внутри корпуса от посторонних глаз), подключившись к компьютеру через USB, сеть или даже беспроводной интерфейс. Самое главное – оснастить устройство необходимыми периферийными устройствами. Всегда учитывайте безопасность при выпуске обновлений программного обеспечения – если процесс недостаточно безопасен, злоумышленники могут не только украсть ваш код, но и модифицировать его и использовать в своих целях.
не исключается.цели. Например, чтобы взять под контроль вещи в “умном доме” или шпионить за WEB-камерой, установленной у вас дома.Архитектура ARM – сегодняшний лидер рынка микроконтроллеров
Со времен царя Гороха микроконтроллеры делятся по битовой глубине данных, с которыми они работают. В подавляющем большинстве случаев, сегодня, в новых проектах, следует выбирать 32-битные микроконтроллеры с ядром ARM. Существует множество вариантов, и вы всегда можете найти тот, который лучше всего подходит для вашего применения. В зависимости от набора функций и производительности цена чипа может составлять от нескольких десятков центов до десятков долларов.
Микроконтроллеры (MCU), в зависимости от архитектуры вычислительного ядра, делятся на большие семейства. Микроконтроллеры с ядрами Cortex-M0 – Cortex-M7 очень популярны для программирования средней и низкой сложности. Чем выше номер, тем больше вычислительных (и невычислительных) возможностей, тем выше цена и максимальное энергопотребление. Успешная преемственность архитектуры сыграла важную роль в популярности ARM. Разработчики могут экономично модифицировать код с микроконтроллера одного производителя на микроконтроллер другого производителя и мигрировать между ядрами разной производительности.
Соперничество с младшими братьями
Однако ARM не всегда “правили”. Я хорошо помню время, когда 8-битные микроконтроллеры были абсолютными лидерами рынка, а 16-битные микроконтроллеры безуспешно пытались вытеснить их со своих позиций, но по иронии судьбы преуспели только 32-битные старшие братья. Как оказалось, к моменту их появления технологии производства чипов уже позволяли интегрировать большие объемы FLASH-памяти по гораздо более низкой цене. Программисты воспользовались этой возможностью и перешли с языка ассемблера на язык более высокого уровня под названием C, структура которого идеально подходила для 32-битной архитектуры. В результате 32-битные микроконтроллеры были намного быстрее своих 8- и 16-битных собратьев, но была одна проблема: они имели более высокое энергопотребление.
Поэтому изначально они использовались в случаях, когда требовалась высокая вычислительная производительность.
Известно, что средний ток потребления вычислительного ядра микроконтроллера значительно увеличивается при повышении тактовой частоты. Первоначально 8-разрядные модели микроконтроллеров имели заметно меньшее энергопотребление при аналогичных рабочих частотах, и могли работать на низких тактовых частотах до 32 кГц.
Энергопотребление микроконтроллеров также сильно зависело от тактовых частот ядра и периферийных устройств, поэтому для регулирования последних в процесс генерации был добавлен блок тактовой частоты FALF, широко используемый в радиопередачах. Это позволило изменять тактовую частоту в широком диапазоне без изменения кварцевого опорного резонатора. Периферийные модули не обязательно должны работать на той же частоте, что и вычислительное ядро. Для снижения энергопотребления частота подается на них через делители с программно управляемым коэффициентом деления. Введена возможность отключения неиспользуемых модулей. Эти меры значительно снизили энергопотребление, но оно все равно было значительно выше, чем у 8-битных MCU.
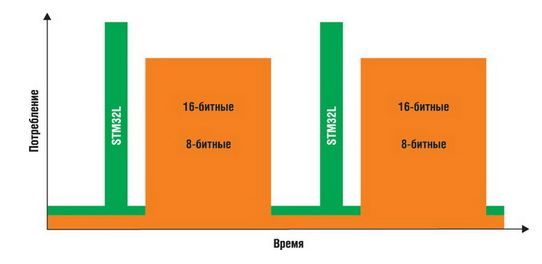
На короткое время наступил паритет – 32-битные MCU заняли нишу топовых приложений, в то время как 8-битные MCU прочно удерживали позиции в устройствах, для которых важно низкое энергопотребление. Так было до тех пор, пока 32-разрядные микроконтроллеры не освоили “импульсный” режим работы в совершенстве.
8-битные микроконтроллеры тоже научились это делать, но из-за низкой производительности им приходилось находиться в спящем режиме гораздо дольше, в результате чего они начали терять мощность, особенно в задачах, требующих больших вычислений, как показано на рисунке ниже.
Об укладке асфальта, пользе сна и его разновидностях
Поэтому микроконтроллеры настолько хорошо научились считать, что выполняют свою работу очень быстро, и большую часть времени им приходится “бить часы”, расходуя энергию на выполнение холостых циклов. В устройствах с автономным питанием это значительно сокращает срок службы батареи или время работы на одной зарядке.
Смотрите, как строители укладывают асфальт. Они внезапно ускоряются, когда прибывает грузовик с новой партией асфальта, а затем замедляются после его укладки. Точно так же микроконтроллеры умеют увеличивать и уменьшать тактовую частоту. Но для них это не так просто, как для рабочих – частота всех внутренних периферийных устройств будет меняться одновременно, поэтому чувствительные компоненты придется перенастраивать.
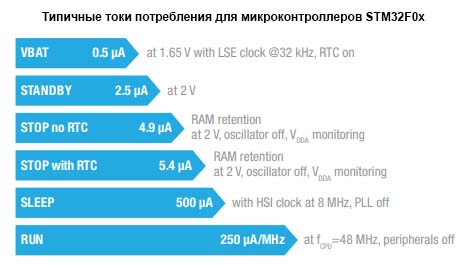
Не проще ли поспать после быстрой работы? Часто да. А типы сна в микроконтроллерах различаются еще сильнее, чем у людей./>Также можно просто вздремнуть. В этом случае наш чип всегда готов, и как только прозвучит сигнал таймера или его потревожит внешнее прерывание, он почти сразу же проснется. Подобно тому, как человек может расслабиться во время сна, но не может хорошо выспаться, если его постоянно дергают, микроконтроллер может снизить энергопотребление в этом режиме “всего” в 10 раз, это называется режимом SLEEP.
Лучший способ хорошо выспаться – это раздеться, лечь в постель, задернуть шторы на окне и завести будильник. Однако после хорошего сна вы не сможете сразу приступить к работе. Предварительно нужно хотя бы ополоснуться холодной водой и одеться. Существует также режим микроконтроллера, в котором он ограничивает количество внешних раздражителей и отключает мастер-часы. Это режим СТОП. В этом режиме вы можете снизить потребление в 1000 раз, но выход из него займет много времени.
Теперь представьте, что перед сном вы приняли большую дозу снотворного, выключили будильник и телефон, закрыли все окна и двери. Это будет режим STAND BY. Вывести его из этого режима можно только с помощью специальных контактов, при этом большая часть памяти о том, что делал MCU перед сном, будет безвозвратно потеряна, и вам придется начинать все сначала. Однако в этом режиме MCU потребляет в два раза меньше энергии.
Последний, довольно экзотический режим, напоминает кому, из которой невозможно выйти без специального оборудования. В этом случае только специальный генератор
тем не менее, часть микроконтроллерана отдельном тактовом кварце, который может работать от собственного источника питания и имеет буквально несколько байт оперативной памяти, задача которой – напомнить микроконтроллеру, из какого состояния он впал в эту кому. Если другие части микроконтроллера отключены, потребляемая мощность может составлять всего одну десятитысячную часть от активного режима.При выборе режима энергосбережения помните о последствиях:
- Чем глубже сон, тем дольше бодрствование
- чем глубже сон, тем меньше способов разбудить микроконтроллер
- чем глубже сон, тем меньше информации остается о предыдущем состоянии микроконтроллера
- для достижения минимальных заявленных значений во многих режимах необходимо предпринять дополнительные действия, например, отключить периферийные устройства
- чтобы минимизировать энергопотребление всего устройства, схемы всего устройства должны быть разработаны соответствующим образом
- чтобы минимизировать энергопотребление устройства в целом, необходимо позаботиться о том, чтобы другие компоненты и схемы также потребляли микропотребление в неактивном режиме. Глупо идти на то, чтобы добиться потребления микроконтроллера менее одного микроампера, и при этом использовать дешевый стабилизатор с вспомогательным током в устройстве 100 мА.
Но это не редкость. - для успешного использования режимов глубокого сна необходимо хорошо продумать не только программу, но и схемотехнику, иначе вместо экономии можно получить очень серьезные проблемы – периодическое, но “мертвое” замораживание по необъяснимой причине, или слишком частые пробуждения, в результате чего потребление на порядки превышает ожидаемое
Если ваш программист и схемотехник уже несколько дней обвиняют друг друга в неуклюжести, а производителя – в публикации нереальных данных в технических паспортах микроконтроллеров, а ваше устройство разряжает батареи на порядок быстрее, чем вы ожидали, это повод хотя бы проконсультироваться с независимыми высококвалифицированными экспертами.
Краткий обзор технологии микроконтроллеров и способов изготовления серий микроконтроллеров
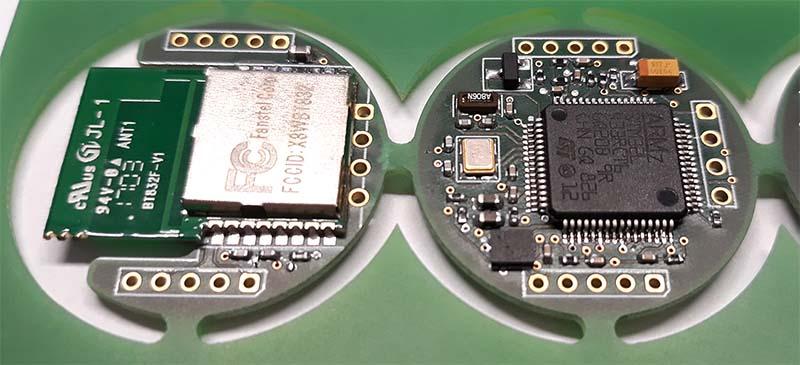
Физически активная часть микроконтроллера, как и подавляющее большинство других микросхем микроконтроллеров, обычно формируется на монокремниевой пластине (в данном контексте будем называть ее чипом). Чипы имеют очень маленькую площадь поверхности, и технологически выгодно производить пластины большого диаметра, поэтому обычно большое количество чипов, как соты, размещают на одной большой пластине и формируют в одном производственном процессе. Затем пластины разрезаются на части, в результате чего получаются отдельные чипы, которые помещаются в корпуса.
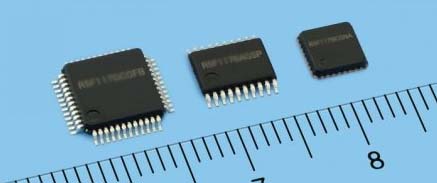
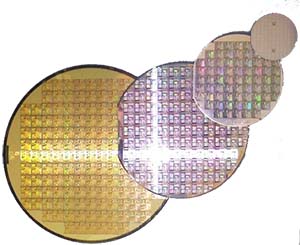 Новая топология чипа и отладка очень дороги, а площадь одного чипа на пластине обычно невелика. Производители хотят выпускать микросхемы большими партиями, но пользователям нужны микроконтроллеры в разных корпусах – одни хотят меньший, более дешевый корпус, а другим нужно больше выводов для управления ЖК-дисплеем или внешней памятью с параллельным интерфейсом. Производителям выгодно охватить все ниши, чтобы покупатели не убегали к конкурентам, не найдя оптимальную для себя модель.
Новая топология чипа и отладка очень дороги, а площадь одного чипа на пластине обычно невелика. Производители хотят выпускать микросхемы большими партиями, но пользователям нужны микроконтроллеры в разных корпусах – одни хотят меньший, более дешевый корпус, а другим нужно больше выводов для управления ЖК-дисплеем или внешней памятью с параллельным интерфейсом. Производителям выгодно охватить все ниши, чтобы покупатели не убегали к конкурентам, не найдя оптимальную для себя модель.Часто выгоднее производить один универсальный чип большими партиями и помещать его в разные упаковки, чем производить десяток разных. Если чип помещен в корпус с небольшим количеством выводов, некоторые порты (в данном контексте под портами подразумеваются контактные пластины на поверхности чипа, которые используются для связи с внешним миром) просто остаются неподключенными. Часто производители идут дальше – чтобы повысить спрос и цену на микроконтроллеры с большим количеством ножек, они искусственно ограничивают функциональность тех, у которых ножек меньше – отключают некоторые функции, ограничивают размер доступной памяти и т.д.
На базе одной ИС они создают серию микроконтроллеров с существенно различающимся объемом памяти и периферийных модулей, а иногда и ценой. В то же время, установленные в них интегральные схемы могут быть вырезаны из тех же плат. Поскольку площадь одной ИС мала, ее вклад в стоимость конечного продукта также невелик, и без нее можно обойтись. Становится выгодным отключение дополнительной памяти и других функций, например, на этапе тестирования – либо с помощью однажды запрограммированных битов конфигурации, либо путем выжигания перемычек лазером. Только для самых массовых продуктов имеет смысл создавать слегка измененный фотошаблон для этой цели. Не обязательно, чтобы неиспользуемая память физически отсутствовала; опять же, ее можно просто отключить, удалив перемычки в шаблоне.
Таким образом, один стандартный чип может быть использован для создания целой серии схем.
Периферийные устройства простейшего ARM-микроконтроллера за полцены
Ядром процессора является мозг, но для того, чтобы он не был похож на “сферического коня в вакууме”, необходимы аналоги органов чувств и конечностей.
В микроконтроллере их роль выполняют контакты на шасси, к которым могут быть подключены порты (контактные площадки) микросхемы внутри шасси. В свою очередь, различные периферийные модули могут быть подключены к одному и тому же порту с помощью внутренних переключателей.
Сначала рассмотрим периферию одной из самых простых серий от ST на базе ядра Cortex-M0 – stm32F03.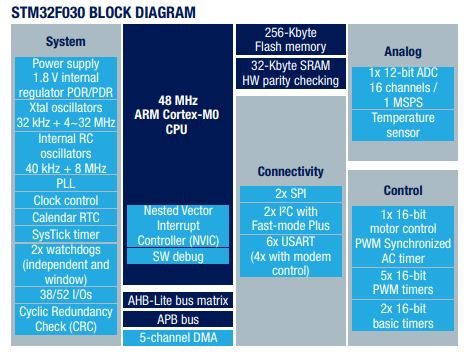
Для этой серии у нас есть следующий набор базовых функций:
Часы реального времени (RTC) Модуль может питаться от отдельного выхода и питается от отдельного низкочастотного резонатора. Этот модуль потребляет очень мало энергии и может работать в течение многих часов на заряженном конденсаторе, если основной источник питания выйдет из строя, или в течение многих лет на небольшой встроенной батарее. Кроме того, он может служить в качестве будильника, выводя микроконтроллер даже из самого глубокого сна в заданное время.WatchDog – это сторожевой таймер, который предотвращает вечный сон микроконтроллера, например, вхождение в бесконечный цикл или переход на несуществующий адрес. Принцип его работы прост. Программатор устанавливает таймер защиты от замерзания на определенное время, скажем, на секунду, и запускает его. Затем он размещает короткие фрагменты кода в выбранных местах программы, которые перезапускают таймер с нулевого значения. Если таймер не сбрасывается в течение секунды, WatchDog считает, что с программой что-то не так, и организует перезапуск микроконтроллера. Программа запускается с самого начала, и вы можете определить, инициировал ли WatchDog сброс, и учесть этот факт при выполнении программы.
Входы-выходы общего назначения GPIO – это наиболее распространенная функция, поддерживаемая большинством выводов микроконтроллера. Они могут быть сконфигурированы как входы или выходы.
Рассматривайте операцию как вход. Если входное напряжение микроконтроллера ниже определенного порога (обычно близкого к половине мощности), оно считывается как логический ноль, в противном случае – как 1. Цифровые входы обычно имеют очень высокое входное сопротивление, поэтому, если их не подключить, их состояние может переходить от нуля к единице и обратно под воздействием электромагнитного поля. Для предотвращения этого существуют специальные режимы, когда вход подключается внутри схемы через резистор 20-50Kohm к плюсу (pull-up) или минусу (pull-down) питания микроконтроллера.
Если выходы сконфигурированы как цифровые выходы, они могут быть установлены программно на высокий уровень которое равно напряжению питания микроконтроллераили низкий. Есть и более интеллектуальные режимы, но не будем вдаваться в подробности.
Распиновка микроконтроллеров – это настоящий шедевр, но чтобы не повредить их, необходимо соблюдать простые правила. Несмотря на все меры предосторожности, предпринимаемые производителями микросхем, они боятся статического электричества и скачков напряжения, поэтому не подключайтесь напрямую к разъемам, выступающим за пределы платы. В этом случае необходимо принять контрмеры – либо использовать специальные встроенные компоненты защиты, либо предусмотреть в цепи аттенюатор, столитсор или защитные диоды, а также установить токоограничивающий резистор в зазоре между контактом разъема и портом.
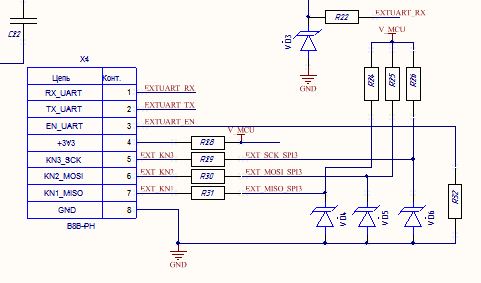
На схеме выше показан участок схемы, которую я разработал (спутниковый модем) с использованием простых компонентов защиты портов микроконтроллера. X4 – разъем для внешней связи. Нас интересуют контакты 5-7, к которым подключены тревожные кнопки. Короткое замыкание на землю используется в качестве сигнала тревоги, поэтому в нормальном состоянии на портах должно быть питание, которое обеспечивается резисторами R24-R26 номиналом 1Kohm. Подавители VD4-VD6 ограничивают напряжение до 5 В, это приемлемо, так как я использую микроконтроллер, который питается от 3,3 В, но имеет порты, допускающие напряжение 5 В. Резисторы R29-R31 равны 100 Ом.
Этот тип защиты защитит порты микроконтроллера от внешних скачков напряжения. В некоторых микроконтроллерах отдельные порты не подвержены влиянию напряжений, превышающих напряжение питания. Во многих микроконтроллерах STM32Fxx, например, почти все порты…при цифровой конфигурации…могут работать с цепями 5 В, но если они работают в аналоговом режиме, например, в качестве входа АЦП, они теряют эту способность, и это необходимо учитывать при проектировании схемы.Необходимо соблюдать правила безопасности. Не оставляйте свободно висящие порты микроконтроллера, настроенные как входы, особенно в устройствах, которые периодически переходят в глубокий сон – это может как минимум затруднить прохождение теста на ЭМС. Если они оставлены в качестве входов, лучше закоротить их на землю или питание. В качестве альтернативы они могут быть сконфигурированы как выходы с помощью программного обеспечения.
Есть еще один совет. Иногда его можно оставить в качестве входа и закоротить на другую цепь. Это помогает при очень плотном отслеживании провести проводник “сквозь” микроконтроллер, что особенно важно для двухслойных плат.
При использовании портов микроконтроллера в качестве выходов также стоит ознакомиться с техническим описанием. Отдельные порты могут иметь различные максимальные пределы тока, которые вы можете получить от них, не беспокоясь об отказе – нагрузочная способность. Кроме того, сам чип имеет максимальную нагрузочную способность для всех выходов вместе взятых, которую не следует превышать.
Наконец, порты вывода в микроконтроллерах ARM не реагируют мгновенно на программные инструкции, как это происходит в 8-битных микроконтроллерах. Они управляются по шине, а их производительность зависит от тактовой частоты соответствующего узла, которая может быть изменена программно. Если вам нужно быстрое время отклика, увеличьте эту частоту, если важнее снижение энергопотребления, выберите более медленный режим.Датчик температуры Микроконтроллер имеет собственный датчик температуры, правда, не очень точный, но, тем не менее, его можно использовать для измерения температуры внутри устройства с определенным допуском.
Уникальный серийный номер Каждый микроконтроллер имеет уникальный серийный номер, который присваивается ему на заводе. Простой в использовании серийный номер, который можно использовать для удобной организации массового производства вашей продукции.
Интерфейсы Различные микроконтроллеры этой серии могут быть оснащены несколькими наиболее часто используемыми интерфейсами, что значительно упрощает связь с другими микросхемами и внешним миром:
- USART – это асинхронный последовательный порт, часто используемый для связи с компьютером.
Там он называется COM или RS232, модемы и другие устройства - SPI – это высокоскоростной интерфейс, который имеет очень много схем, таких как внешняя память.
- I2C – это двухпроводной интерфейс, предназначенный для обмена данными с датчиками и другими периферийными устройствами на коротких расстояниях и с низкой скоростью обмена. Основным преимуществом является то, что к одной шине одновременно могут быть подключены десятки различных устройств.
Аналого-цифровой преобразователь АЦП или ADC который я должен описать более подробно.
Это чрезвычайно полезный модуль, который может измерять напряжение аналоговых сигналов. Он оценивает их в долях от значения источника опорного сигнала, в нашем случае это напряжение питания аналогового модуля микроконтроллера, которое может быть равно или немного ниже основного напряжения питания системы. Теоретическая точность АЦП зависит от его разрешения. В современных микроконтроллерах чаще всего используется 12-битный АЦП с последовательной аппроксимацией, реже – 10 и экзотически – 16.

При напряжении 3 вольта 12-битный АЦП в микроконтроллере будет иметь разрешение 3/4096=0,00073 вольта – лучше, чем один милливольт.
Однако на практике достичь этого идеала бывает непросто.
На практике ситуация далека от идеальной, и точность измерений может ухудшиться по ряду причин. Вот основные из них, хорошо известные любому квалифицированному специалисту по электронике, и простые, но эффективные способы минимизировать их разрушительное влияние
Нестабильность напряжения питания АЦП- Используйте линейные регуляторы с хорошими параметрами для питания MCU
- Используйте высокостабильные источники опорного напряжения для питания аналоговой части MCU
- соединить аналоговое питание с цифровым через простые низкочастотные фильтры – запитать аналоговую часть MCU через индуктивность и рядом со входом микроконтроллера установить керамический конденсатор с диэлектрической емкостью XR7 в 100 нанофарад, а лучше параллельно ему подключить танталовый конденсатор в одну-две микрофарады.
- Пропустите входной сигнал хотя бы через простой ФНЧ, состоящий из резистора и конденсатора. Одного конденсатора с диэлектрической емкостью NP0 порядка десятков пикофарад, установленного между входом и землей, вблизи входа АЦП, иногда бывает достаточно для борьбы с помехами от радиопередатчиков и короткоимпульсных помех.
- не экономьте на блокировочных конденсаторах, по крайней мере, для самого микроконтроллера, они должны быть установлены возле каждого вывода питания и в других местах, рекомендованных производителем, с рекомендуемым номиналом
- тщательно выбирайте расположение компонентов и соблюдайте правила для цепей питания, особенно для заземления, желательно, чтобы аналоговая и цифровая земля были соединены в одной точке, рядом с аналоговым выводом заземления микроконтроллера
- выбрать подходящие параметры для настройки АЦП, например, многие микроконтроллеры могут увеличить время зарядки входной цепи, хотя вам придется пойти на компромисс и снизить эффективность
- для установки буферных усилителей на базе ОУ или усилителей напряжения на входе АЦП. Не выбирайте их на основе самых дешевых, вы не сможете улучшить, а только ухудшите ситуацию, причем значительно. Если у вас недостаточно опыта, лучше поискать схемы, специально рекомендованные производителем для таких применений.
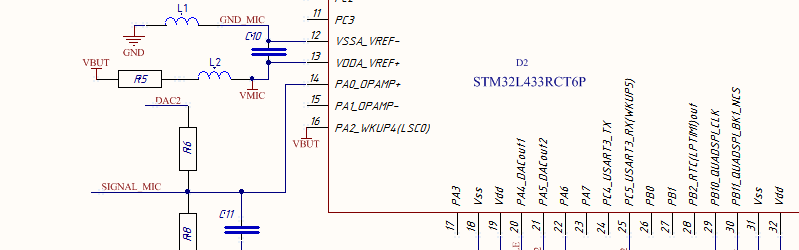
Выше приведен фрагмент реальной схемы для питания аналоговой части микроконтроллера в устройстве с батарейным питанием. В данном случае я использовал АЦП для оцифровки сигнала с аналогового микрофона MEMS, поэтому имело смысл обеспечить не только аналоговое питание, но и аналоговую землю в отдельной цепи. В большинстве случаев в этом нет необходимости, для того чтобы он был действительно полезен, необходимо также обеспечить надлежащую маршрутизацию.
Схема VBUT питает всю цифровую часть микроконтроллера. На всякий случай – R5-10 Ом, C10 0,1 мкФ, индуктивности L1 и L2 BLM18PG471SN1D в большинстве случаев можно опустить.
Еще один интересный пример из моей практики. На плате с большим количеством мощных ASIC требовалось измерить их температуру. Самый простой и дешевый способ – использовать высокоомные термисторы. Я использовал высокие конденсаторы в качестве фильтров, пользуясь тем, что температура меняется относительно медленно. В случае оцифровки звука этот трюк точно не сработает.
Остается упомянуть еще одно важное свойство АЦП, характерное для микроконтроллеров. Как правило, он имеет один или два модуля АЦП, но входов может быть несколько. В этой серии модуль равен 1, а входов может быть до 16. Как это можно сделать? Очень просто, входы подключаются к нему с помощью переключателя. Если вы собираетесь измерять напряжение с 10 входов, вам нужно организовать цикл – переключайте переключатель на каждый из 10 входов по очереди и измеряйте. Учитывайте это при расчете времени измерения. В этой серии АЦП теоретически способен произвести измерение за 1 микросекунду. Получается, что полный цикл из 10 измерений займет у вас ровно больше 10 микросекунд!
Прямой доступ к памяти RAP или DMA – является еще одной важной особенностью. Этот модуль позволяет передавать данные с периферии в память или наоборот.
Например, вы можете использовать его для выделения области памяти для хранения данных, поступающих от АЦП, и создания из них кольцевого буфера. Затем мы переводим АЦП в режим чтения через регулярные промежутки времени. Используя механизмы DMA, считываемые данные без вмешательства ядра будут самостоятельно, байт за байтом, помещаться в выделенный буфер. Когда буфер будет заполнен, ядро получит сигнал о начале программной обработки, и DMA начнет процесс загрузки заново. Поскольку DMA имеет несколько каналов, в нашем случае никто не мешает реализовать автоматический вывод на USART из буфера. В результате мы получаем свободный от ядра процесс отправки показаний АЦП на USART, а кропотливая работа программиста по настройке DMA окупится с лихвой.
Широтно-импульсная модуляция или модуль ШИМ Это очень полезная и широко используемая функция, с помощью которой можно управлять яркостью светодиодов, скоростью вращения двигателя, рулем, создавать интеллектуальные DC-DC преобразователи и даже синтезировать звук.
Что можно получить, добавив 30 центов?
Переход на Cortex-M0+. Самый дешевый способ получить дополнительные функции
А какие дополнительные возможности предлагает последняя серия микроконтроллеров с чуть более современным ядром, чем Cortex-M0+, при том, что его цена на 20-50 центов дороже аналогов рассмотренных выше серий по рамке и количеству выводов?
Таблица различий между сериями
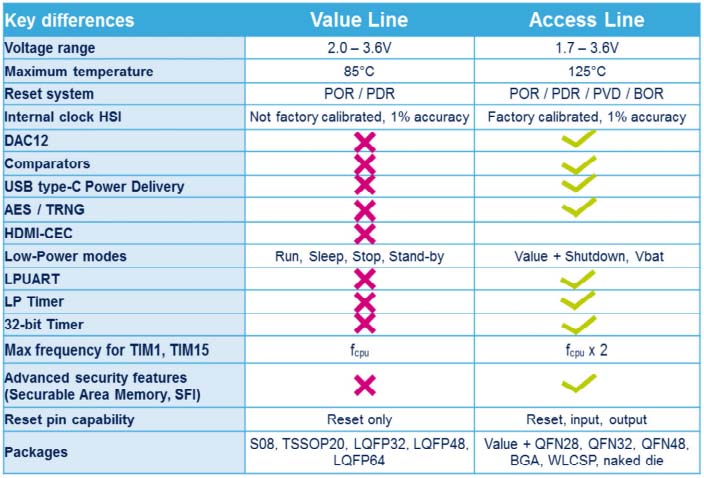
- Максимальная тактовая частота удваивается
- Минимальное напряжение питания снизилось с 2 до 1,7 В.
- Конвертер АЦП в два с половиной раза быстрее
- Добавлены два канала 12-битных цифро-аналоговых преобразователей. Это очень полезная особенность, которая позволяет формировать на штырьках сигнал заданного напряжения с точностью лучше 1 мВ, например, сигналы любой формы в акустическом диапазоне частот.
- Появились компараторы – устройства для сравнения значений двух аналоговых сигналов, которые могут быть полезны, например, для определения возникновения сверхтока.
- Добавлен интерфейс USB, позволяющий подключать устройства к ПК. Особого внимания заслуживает поддержка опций управления питанием при реализации интерфейса, совместимого с USB Type3-C. Я говорил об этом в одной из своих статей о Хабре.
- Появился ускоритель AES для 256-битных процедур шифрования/дешифрования.
- UART теперь способен работать в спящем режиме и аппаратно поддерживает протоколы LIN (простые сети, широко используемые в автомобильной промышленности), IRDA (протокол инфракрасного светоизлучающего диода, считай, телевизионные пульты дистанционного управления), SIM-карту…
- Расширены возможности модулей таймера и ШИМ
- Верхний предел диапазона рабочих температур увеличен до 125 градусов
- Повышенная надежность благодаря расширенным режимам перезапуска в случае проблем с электропитанием.
- добавлен “честный” аппаратный генератор случайных значений – полезен в криптографии
И что добавит к этому переход на Cortex-M4, кроме увеличения цены в несколько раз?
- Максимальная тактовая частота была увеличена до 80 МГц.
- Появился блок ускорения с плавающей запятой
- Максимальный объем встроенной памяти, конечно же, увеличен
- Модели с более чем 100 ножками поддерживают внешнюю статическую память.
- USB теперь способен работать в режиме HOST
- Появился драйвер интерфейса CAN. Это очень перспективный интерфейс, предназначенный для высоконадежных приложений. Она зародилась в автомобильной промышленности и почти 20 лет вела долгую войну против устаревшего RS-485 в очень консервативной отрасли промышленной автоматизации.
- Появился интерфейс для карт памяти SD. Это очень полезная функция – вы добавляете к устройству скрепку за 50 центов и получаете съемный диск, который может вмещать десятки гигабайт! Большинство карт также работают через обычный SPI, но на гораздо более низкой скорости.
- Добавлен встроенный операционный усилитель с широким диапазоном рабочих режимов. Именно из-за этой и предыдущих особенностей я выбрал M4 вместо M0+ для своего недавнего проекта беспроводного стетоскопа. В результате можно управлять усилением MEMS-микрофона и хранить десятки часов аудиозаписей сердца на SD-карте.
- Криптомодуль научился читать функции HASH в аппаратном обеспечении.
- Контроллер сенсорных приложений был усовершенствован для поддержки не только кнопок, но и элементов прокрутки.
Cortex-M7 – когда вы хотите большего.
В подавляющем большинстве проектов возможностей перечисленных выше ядер достаточно, но есть и исключения. У меня было лишь несколько исключений, и только один раз по действительно важной причине: мне нужна была высокая производительность при подготовке данных для ASIC, контроллера Ethernet и шины CAN-FD с более быстрой заменой.
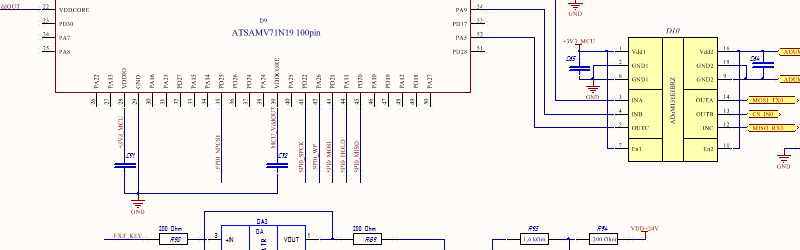
На уровне универсальных микроконтроллеров с ядрами Cortex 4 и ниже, по моему субъективному мнению, ST лидирует по параметру цена/функциональность, но в плане более мощных чипов уступает ATMEL, а точнее MICROCHIP, который недавно поглотил ее. Поэтому я остановился на серии ATSAMV71 по цене от 6 долларов.
В дополнение к вышеперечисленному (контроллер Ethernet и шина CAN-FD) мы получаем повышающее производительность ядро с ускорителем операций, тактовая частота которого достигает 300 МГц, интерфейсы для видеоматрицы и поддержку динамической памяти.
Наконец, я попрошу тех, кто имеет опыт работы с микроконтроллерами, выбрать правильный ответ на вопрос.
Чтобы дать читателям некоторое представление о функциях и возможностях современных контроллеров, ниже приводится описание контроллера станции дискет из новаторской работы Э. Таненбаума об операционных системах12. “Основные команды – это чтение и письмо. Каждый из них требует 13 параметров, упакованных в 9 байт. Эти параметры определяют такие вещи, как адрес блока на диске для чтения, количество секторов на дорожке, физический режим записи и расстояние между секторами. В них также указано, что делать с адресной меткой данных, которые были стерты. Если вы не можете понять его сразу, не волнуйтесь – только те, кто знаком с ним, могут полностью его понять. По завершении операции микросхема контроллера возвращает 23 параметра, упакованных в 7 байт, с указанием наличия и типов ошибок.
Контроллеры
Контроллер – это Электронное устройство, предназначенное для подключения периферийных устройств, различающихся по принципу действия, интерфейсу и конструкции, к шине компьютера. (см. также “.Функциональное устройство” и “Шины и интерфейсы”).
Термин “контроллер” очень похож по значению на другой термин, “адаптер“. Назначение обоих одинаково, но контроллер несколько сложнее: ” подразумевает определенную активность – способность действовать самостоятельно после получения команд от программы, которая им управляет. Усовершенствованный контроллер может также иметь свой собственный процессор “11 . На уровне обычного пользователя эти термины практически неразличимы и могут считаться синонимами.
Другим подобным устройством является сопроцессор. Сопроцессоры “помогают” главному процессору (центральный) процессор, выполняющий программу, для выполнения сложных специфических функций. Примером может служить графический сопроцессор, который выполняет геометрические построения и обработку графических изображений – его можно считать графическим контроллером. Несколько иначе работает математический сопроцессор, который выполняет свои функции “сам по себе”, не управляя никакими внешними устройствами.
Все вышеперечисленные устройства служат для снижения нагрузки на процессор и повышения общей производительности системы. Важность контроллеров заключается в том, что они освобождают центральный процессор от самых медленных функций ввода/вывода. Идеи использования специализированных интеллектуальных схем для разгрузки центрального вычислительного блока возникли еще в третьем поколении больших коллективных машин IBM-360 (в СССР это семейство машин было известно как “аналог” под названием ЭВМ). В четвертом поколении стало технологически возможным собирать схемы управления в одном чипе, и микроконтроллеры были представлены микроконтроллеры..
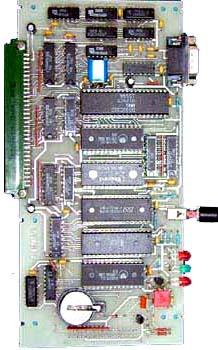
На рисунке показан вид микроконтроллера внутри клавиатуры. Следует отметить, что внутри компьютера есть еще один контроллер, который управляет клавиатурой. Кроме того, все устройства ввода/вывода и внешняя память также имеют свои собственные контроллеры.
Контроллер обычно содержит собственный микропроцессор, ОЗУ, ПЗУ, регистры внешних устройств (через которые контроллер взаимодействует с центральным процессором) и буферные (согласующие) схемы. В некотором смысле, комплексный контроллер – это упрощенный, специализированный компьютер.
Чтобы дать читателям некоторое представление о функциях и возможностях современных контроллеров, ниже приводится описание контроллера станции дискет из новаторской работы Э. Таненбаума об операционных системах12. “Основные команды – это чтение и письмо. Каждый из них требует 13 параметров, упакованных в 9 байт. Эти параметры определяют такие вещи, как адрес блока на диске для чтения, количество секторов на дорожке, физический режим записи и расстояние между секторами. В них также указано, что делать с адресной меткой данных, которые были стерты. Если вы не можете понять его сразу, не волнуйтесь – только знающие люди могут понять его полностью. По завершении операции микросхема контроллера возвращает 23 параметра, упакованных в 7 байт, отражающих наличие и типы ошибок.
Контроллер современного жесткого диска еще более интеллектуальный. Например, он “запоминает” все существующие плохие сектора на магнитной поверхности (а при современной плотности записи они неизбежны!) и может заменить их запасными, создавая впечатление абсолютно безупречного диска. Или другой пример. Современные жесткие диски используют технологию S.M.A.R.T. (Sэльф Mмониторинг Aанализ и Rотчет Tтехнология – Слово “smart” также означает “умный” или “сообразительный” на английском языке). Жесткий диск с этой функцией ведет статистику своей производительности с момента первого запуска, записывая результаты в скрытую область диска. Собранные данные могут помочь экспертам проанализировать состояние жесткого диска и условия его эксплуатации.
Рекомендуемая практика
Базовый курс информатики
Строго говоря, в Стандарте и Примерном учебном плане нет термина “контролер”. Однако мы считаем, что желательно, чтобы студенты имели минимальное представление о контроллерах и их функциях.
Курс информатики в старших классах
Стандарты (базовые и профильные) для старших классов средней школы включают темы по архитектуре и устройству современных компьютеров. Очевидно, что невозможно обсуждать эти темы, не упоминая термины “адаптер”, “контроллер” и “сопроцессор”. Материал, представленный в этой статье, можно рассматривать как минимум информации, который должен быть представлен ученику средней школы в рамках знакомства с современным компьютером.
11 Гук М. Аппаратное обеспечение IBM PC. Энциклопедия. СПб: Питер, 2003, 923.
12 Э.Таненбаум. Современные операционные системы. СПб: Питер, 2004, 1040 стр.
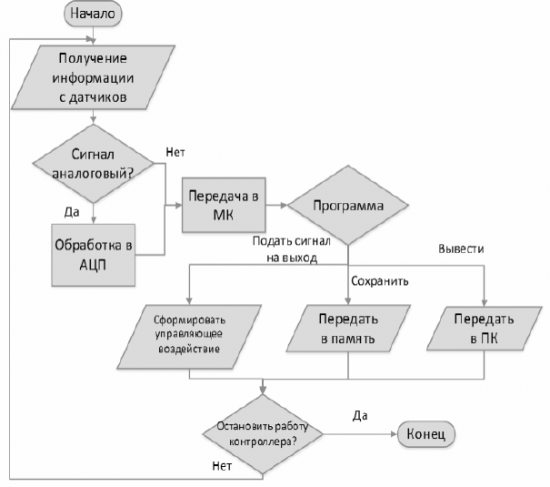
Алгоритм работы ПЛК:
Что такое программируемый логический контроллер
Контроллер (от английского слова Control) означает контроль. Контроллер в автоматизированных системах – это техническое устройство, выполняющее функции управления физическими процессами по фиксированному алгоритму, используя информацию, получаемую от датчиков и передаваемую на оконечные устройства. Каждое устройство, способное работать в автоматическом режиме, имеет контроллер – модуль, определяющий логику работы устройства.
Программируемые логические контроллеры (ПЛК) – технические средства, используемые для автоматизации технологических процессов. Это специализированное электронное устройство, работающее в режиме реального времени.
ПЛК может быть запрограммирован в цифровом виде и, таким образом, очень легко адаптируется к требованиям конкретного процесса. В связи с растущими требованиями к современному оборудованию и производственным процессам, решения по автоматизации на базе ПЛК стали неотъемлемой частью повседневного промышленного производства.
Основным режимом работы ПЛК является его длительное автономное использование, часто в неблагоприятных условиях окружающей среды, с минимальным обслуживанием и без вмешательства человека. ПЛК обычно используются для управления последовательными процессами, используя входы и выходы для определения состояния объекта и выдачи команд управления.

Программируемые логические контроллеры идеально подходят для индивидуального управления различными приложениями, машинами, системами и процессами или для управления электропитанием с использованием цифровой технологии.
Программируемый логический контроллер – это микропроцессорное устройство, предназначенное для сбора, обработки, преобразования, хранения информации и выработки команд управления, имеющее конечное число входов и выходов, датчиков, ключей, исполнительных механизмов, подключенных к ним к объекту управления и предназначенное для работы в режимах реального времени.

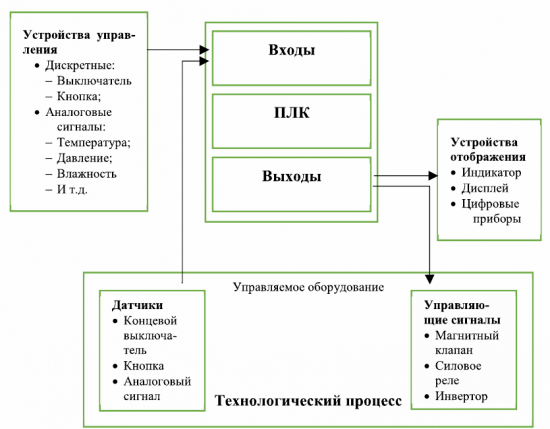
Типичный ПЛК состоит из следующих частей:
- Входы подключают к блоку управления, например, кнопки, фотоэлементы или датчики температуры. С помощью этих компонентов система ПЛК может контролировать текущее состояние машины.
- К выходам подключаются устройства, например, электродвигатели, гидравлические клапаны, которые ПЛК использует для управления конкретной машиной.
- Программа пользователя, программное обеспечение для ПЛК, обеспечивает переключение выходов в соответствии с активацией входов.
- Интерфейс связи используется для подключения ПЛК к другим системам.
- ПЛК также имеет свой собственный источник питания, процессор и внутреннюю шину.
Современные релейно-контактные системы управления характеризуются низкой надежностью, разомкнутыми контактами и т.д. Наиболее эффективно использовать программируемые логические контроллеры (ПЛК) для автоматизации локальных систем управления.
С течением времени ПЛК развивались и адаптировались к специфическим потребностям промышленной среды. Функции ПЛК имеют множество преимуществ: благодаря своей гибкости они могут использоваться во многих отраслях промышленности. Настройки можно изменить в любое время, не вмешиваясь в работу устройства.
Только индивидуально программируемые устройства для управления, контроля и регулирования производственных машин могут соответствовать высоким требованиям современной промышленности.
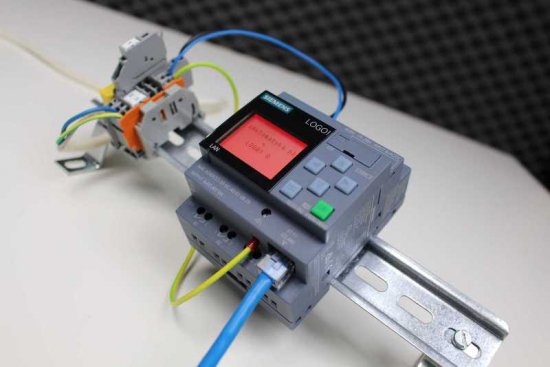
ПЛК обычно может быть установлен непосредственно на производственной машине. Это экономит ценное пространство. В дополнение к возможности дистанционного управления ПЛК, одним из его самых больших преимуществ является возможность коммуникации.
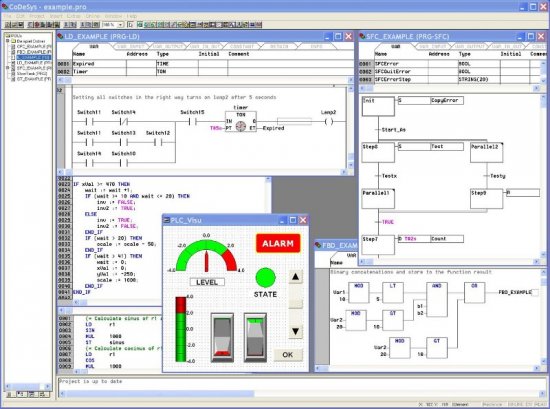
ПЛК можно программировать в соответствии с IEC-61131-3. Программирование ПЛК осуществляется с помощью специализированных пакетов, одним из самых популярных является CoDeSys. Он содержит следующие языки: графические (лестничная диаграмма, функциональная блок-схема, последовательная функциональная диаграмма, непрерывная функциональная диаграмма), текстовые (список инструкций, структурированный текст).

Первый в мире программируемый логический контроллер появился в середине 20-го века. Modicon 084 представлял собой шкаф с набором взаимосвязанных реле и контактов и имел объем памяти всего 4 килобайта. Термин ПЛК был введен компанией Allen-Bradley в 1971 году. Наряду с Ричардом Морли, он является “отцом ПЛК”.
Создание первой из этих систем приписывается двум техникам – Ричарду Е. Морли и Одо Дж. Строгеру. В то время как Морли представил свою систему “Modicon 084” как “твердотельный последовательный логический компьютер” в 1969 году, Одо Дж. Стругер участвовал в разработке ПЛК для компании Allen-Bradley из Висконсина. Оба инженера считаются создателями первого программируемого логического контроллера (ПЛК). Со временем требования к производственным средам по всему миру возросли. Таким образом, ПЛК развивался и был представлен во многих версиях.
– Инженер-электрик Яков Кузнецов
Структура программируемого логического контроллера:
Алгоритм работы ПЛК:
Основным режимом работы ПЛК является его длительное автономное использование, часто в неблагоприятных условиях окружающей среды, без серьезного технического обслуживания и с минимальным вмешательством человека или вообще без него.

ПЛК имеют ряд особенностей, которые отличают их от других электронных устройств, используемых в машиностроении:
В отличие от микроконтроллера (одночипового компьютера) – схемы, предназначенной для управления электронными устройствами, – областью применения ПЛК обычно является автоматизация промышленных производственных процессов в контексте производственного предприятия;
В отличие от компьютеров, ПЛК сосредоточены на машинных агрегатах посредством расширенного ввода данных с датчиков и отправки сигналов на исполнительные механизмы, ориентированные на принятие решений и управление оператором;
В отличие от встраиваемых систем, ПЛК производятся как самостоятельные продукты, отдельно от устройств, которыми они управляют.
Расширенные логические операции и возможность установки таймеров и счетчиков.
Все языки программирования ПЛК имеют легкий доступ к манипулированию битами в машинных словах, в отличие от большинства языков программирования высокого уровня современных компьютеров.
Существуют различные уровни сложности ПЛК в зависимости от сложности выполняемых задач автоматизации.
Основные операции ПЛК соответствуют комбинационному управлению логическими схемами конкретных машин – механических, электрических, гидравлических, пневматических и электронных.
В процессе управления контроллеры генерируют выходные сигналы (включение/выключение) для управления исполнительными механизмами (двигателями, клапанами, соленоидами и вентилями) на основе обработки сигналов, полученных от датчиков или ведущих устройств.
Современные программируемые контроллеры выполняют и другие операции, например, совмещают функции счетчика и интервального таймера, обрабатывают задержанные сигналы.

Программируемые логические контроллеры среднего и высокого уровня обычно имеют встроенные аппаратные и программные средства управления движением, такие как модули высокоскоростных счетчиков, модули позиционирования и т.д., которые реализуют функции управления движением с относительной легкостью и обеспечивают позиционирование с высокой точностью.
ПЛК были разработаны для работы в типичных промышленных условиях с учетом загрязненной атмосферы, уровня сигнала, устойчивости к температуре и влажности, ненадежных источников питания, механических ударов и вибрации. С этой целью аппаратура была заключена в прочный корпус, который минимизирует негативное воздействие многих промышленных факторов.

Основное различие между ПЛК и системами управления на основе реле заключается в алгоритмах, которые реализуются с помощью программного обеспечения. На одном контроллере может быть реализован эквивалент тысяч элементов жесткой логики. Надежность схемы не зависит от ее сложности.
Традиционно программируемые логические контроллеры использовались на нижних уровнях систем автоматического управления технологическими процессами (PLC), систем, непосредственно связанных с производственным процессом.
ПЛК обычно являются первым шагом в построении системы управления технологическим процессом. Это связано с тем, что необходимость автоматизации отдельной машины или установки всегда наиболее очевидна. Это дает быстрый экономический эффект, повышает качество продукции и позволяет избежать рутинной работы, требующей больших ручных усилий. ПЛК, по определению, предназначены для такой работы.
Основные преимущества ПЛК заключаются в том, что один небольшой механизм может заменить большое количество электромеханических реле, а также в быстром времени сканирования, компактных схемах ввода/вывода, стандартизированных средствах программирования и специальных интерфейсах, позволяющих подключать нетрадиционные устройства автоматизации непосредственно к контроллеру или интегрировать различные устройства в единую систему управления.
Выбор правильного ПЛК
Выбор правильного ПЛК – важная и сложная задача на любом промышленном предприятии, где требуется автоматическое управление технологическими процессами.
При выборе необходимо учитывать и оценивать множество факторов. Сочетая технологические требования к конкретному объекту автоматического управления со сравнительным анализом современных программируемых логических контроллеров, вы сможете принять правильное решение.
При покупке ПЛК в первую очередь следует обратить внимание на то, какой тип подходит для предполагаемого применения.
Классические ПЛК – это модули, которые обычно программируются с помощью компьютера. Впоследствии компьютер больше не нужен для управления самим ПЛК. В целом, следует различать модульные ПЛК, компактные ПЛК и ПЛК с разъемами.
Компактные ПЛК обычно дешевле и занимают меньше места. Затем он используется в основном для небольших процессов автоматизации.
Помимо приложений на базе ПК, существуют также компактные ПЛК, которые можно программировать с панели управления без ПК.
Модульные ПЛК обеспечивают гибкость при создании блока управления из отдельных подключаемых модулей, что позволяет программировать более сложные задачи автоматизации.
Существуют модули, которые могут быть внедрены в систему в виде сменных плат в свободный слот на материнской плате.
Также необходимо различать ПЛК по способу выполнения ими своей работы. Помимо моделей, управляющих входами в заранее определенном цикле, и ПЛК, обрабатывающих выходы на разных этапах, существуют также модели ПЛК, управляемые событиями.
Перед покупкой ПЛК следует обратить особое внимание на количество входов и выходов. Затем рассмотрите другие параметры, которые не были включены в первоначальное планирование. Вам также следует подумать, нужен ли вам ПЛК со встроенным дисплеем и сенсорной панелью. В некоторых случаях может быть достаточно считывать значения и управлять системой с помощью существующей ИТ-инфраструктуры.
Что такое программируемый терминал
HMI (Human Machine Interface) – это интерфейс связи между человеком и машиной. Эти интуитивно понятные и удобные интерфейсы позволяют пользователям контролировать и управлять машинами без глубоких знаний программирования ПЛК. Одним из типов устройств HMI являются системы SCADA: Системы диспетчерского управления и сбора данных (SCADA-системы)
Если вам понравилась эта статья, пожалуйста, поделитесь ссылкой на нее в своих социальных сетях. Это очень поможет в развитии нашего сайта!
Управляющая программа основана на логических выражениях, состоящих из операндов и переменных. Программа также состоит из операторов. Операторы – это команды языка программирования.
Существует множество компаний, производящих промышленные контроллеры – это:
- Advantech,
- Дельта,
- VIPA,
- Mitsubishi Electric,
- WAGO I/O,
- Феникс Контакт
- и многие другие.
Российские производители ПЛК :
- Контар,
- Баран,
- Сегнетика,
- Фаствел,
- Текон.
На что обратить внимание при покупке
Все зависит от типа производства и выполняемых задач, но есть и универсальные решения. Ключевые моменты:
- Универсальность среды разработки для различных платформ;
- Контроллеры с распределенным вводом/выводом;
- Устройства со встроенными входами/выходами;
- Возможность подключения к ПК;
- Дублирование систем ЦП и ввода/вывода;
- ПЛК с поддержкой Web;
- ПЛК с процессором типа ПК;
- Мобильные устройства для разработки программ.
Самым важным здесь является первый пункт. Не стоит пытаться найти самое дешевое оборудование на рынке – процесс переобучения сведет на нет всю экономию. Стоит выбрать несколько производителей и работать только с их продукцией.
Другие говорят, что самое главное – это программное обеспечение. Разница в удобстве использования программных продуктов гораздо больше, чем в случае с аппаратными средствами ПЛК.
- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Микропроцессор: назначение и использование.
- Основы и принципы программирования ПЛК; Сайт для электриков – статьи, советы, примеры, схемы.
- Системы охлаждения. Часть 1.
- Кибернетика, что это такое? Происхождение и справочная информация.
- АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ it. Что такое система автоматического управления?.
- Релейно-контактные системы управления – ЭЛЕКТРИЧЕСКИЙ ПРИВОД.