Коэффициент скольжения при номинальной нагрузке для стандартных асинхронных двигателей колеблется в пределах 2-3%, для асинхронных двигателей с чрезмерным скольжением он может достигать 10% и более при номинальной нагрузке.
Полюсные пары в асинхронном двигателе что это такое
Изобретателем асинхронного двигателя считается Михаил Осипович Доливо-Добровольский, получивший в 1889 году патент на двигатель с ротором “беличья клетка”, а в 1890 году – на двигатель с фазированным ротором, оба из которых используются до сих пор без особых конструктивных изменений. Галилео Феррарис и Никола Тесла независимо друг от друга провели первые исследования и разработки в этой области в 1888 году.
Основным отличием разработки Доливо-Добровольского от разработки Теслы было использование трехфазной, а не двухфазной конструкции статора. Первые двигатели были продемонстрированы на Международной электротехнической выставке во Франкфурте-на-Майне в сентябре 1891 года. Там были представлены три трехфазных асинхронных электродвигателя, самый мощный из которых имел мощность 1,5 кВт. Конструкция этих машин была настолько удачной, что до настоящего времени они не претерпели никаких серьезных изменений.
Определение асинхронной машины следующее:
Асинхронная машина – это электрическая машина переменного тока, в которой скорость вращения ротора не равна скорости магнитного поля, создаваемого обмотками статора.
Как определить скорость вращения электродвигателя?
Под частотой вращения асинхронного электродвигателя обычно понимается угловая скорость его ротора, которая указывается на заводской табличке двигателя как число оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, добавив конденсатор параллельно одной или двум обмоткам, в зависимости от напряжения сети, но конструкция двигателя при этом не изменится.

Если ротор под нагрузкой делает 2760 об/мин, угловая частота двигателя будет 2760*2pi/60 радианов в секунду, или 289 рад/с, что неудобно для восприятия, поэтому на этикетке просто написано “2760 об/мин”. Для асинхронного двигателя это скорость с учетом проскальзывания.
Синхронная скорость данного двигателя (без учета скольжения) будет равна 3000 об/мин, так как при питании обмотки статора сетевым током частотой 50 Гц каждую секунду магнитный поток будет совершать 50 полных циклических изменений, а 50*60 = 3000, поэтому получается 3000 об/мин – синхронная скорость асинхронного двигателя.
В этой статье мы обсудим, как определить синхронную скорость неизвестного асинхронного трехфазного двигателя, глядя на статор. Вы можете легко определить синхронную скорость электродвигателя по внешнему виду статора, расположению обмоток и количеству пазов, если у вас нет под рукой тахометра. Поэтому давайте начнем с самого начала и разберем дело на примерах.
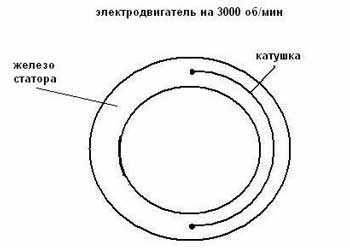
3000 об/мин
Асинхронные двигатели (см. – Типы двигателей) обычно описываются как имеющие одну, две, три или четыре пары полюсов. Минимум – одна пара полюсов, поэтому минимум – два полюса. Взгляните на рисунок. Здесь видно, что статор имеет две катушки, расположенные последовательно для каждой фазы – в каждой паре катушек одна находится напротив другой. Эти катушки образуют пару полюсов на статоре.
Для наглядности одна из фаз показана красным цветом, вторая – зеленым, а третья – черным. Обмотки всех трех фаз расположены одинаково. Поскольку три обмотки питаются поочередно (трехфазный ток), за одно колебание из 50 в каждой фазе – магнитный поток статора один раз поворачивается на полные 360 градусов, т.е. делает один оборот за 1/50 долю секунды, поэтому в секунду получается 50 оборотов. В результате получается 3000 оборотов в минуту.
Таким образом, становится ясно, что для определения синхронного вращения асинхронного электродвигателя достаточно определить количество пар полюсов, что легко сделать, сняв крышку и посмотрев на статор.
Разделите общее количество пазов статора на количество пазов на секцию обмотки одной фазы. Если получается 2, то перед вами биполярный двигатель с одной парой полюсов. Следовательно, синхронная частота составляет 3000 об/мин или около 2910 с учетом скольжения. В простейшем случае имеется 12 пазов, по 6 пазов на катушку, и таких катушек 6 – по две на каждую из трех фаз.
Обратите внимание, что количество витков в группе для одной пары полюсов может быть не обязательно 1, но также 2 и 3, но мы включили в пример одиночные группы на пару обмоток (в этой статье мы не будем рассматривать методы намотки).
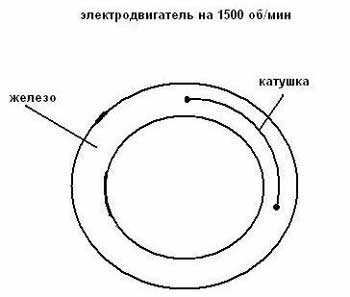
1500 об/мин

Для достижения синхронной скорости 1500 об/мин число полюсов статора удваивается, так что за 1 колебание в 50 магнитный поток сделает только половину оборота – 180 градусов.
Для этого на каждую фазу изготавливается по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, мы имеем двигатель с двумя парами полюсов, образованных четырьмя катушками на фазу.
Например, одна катушка занимает 6 гнезд из 24, или 12 из 48, поэтому мы имеем двигатель с синхронной частотой 1500 об/мин, или скольжением, около 1350 об/мин. На представленном рисунке каждая секция обмотки выполнена в виде группы из двух катушек.
1000 об/мин
Как вы уже поняли, для достижения синхронной частоты 1000 об/мин каждая фаза уже образует три пары полюсов, так что за одно колебание в 50 (герц) магнитный поток повернется только на 120 градусов и соответственно повернет ротор за ним.
Таким образом, в статоре устанавливается минимум 18 катушек, причем каждая катушка занимает одну шестую часть всех пазов (шесть катушек на фазу – три пары). Например, если имеется 24 слота, одна катушка будет занимать 4 из них. Из этого следует, что скорость скольжения составляет около 935 оборотов в минуту.
750 об/мин
Для достижения синхронной скорости 750 об/мин необходимо три фазы, чтобы создать четыре пары подвижных полюсов на статоре, таким образом, 8 катушек на фазу – одна напротив другой – 8 полюсов. Если, например, на каждые 6 пазов приходится по катушке на 48 пазов – мы имеем асинхронный двигатель с синхронной скоростью 750 (или около 730 с учетом скольжения).
500 об/мин
Наконец, чтобы получить асинхронный двигатель с синхронной скоростью 500 об/мин, необходимо 6 пар полюсов – 12 катушек (полюсов) на фазу, так что при каждом смещении сетки магнитный поток поворачивается на 60 градусов. Так, например, если статор имеет 36 пазов, по 4 паза на катушку, то мы имеем трехфазный двигатель с 500 об/мин (480 с учетом скольжения).
См. также: Как отличить асинхронный двигатель от двигателя постоянного тока
Полюса рассчитываются попарно в соответствии со скоростью вращения двигателя.
Сколько полюсов имеет трехфазный асинхронный двигатель с короткозамкнутым ротором?

Полюса рассчитываются попарно в соответствии со скоростью вращения двигателя.

Столбы или провода? Полюса варьируются от двигателя к двигателю, а выходов может быть 3 (при соединении “вай-фай”) или 6 (при соединении “вай-треугольник” или “треугольник”).

Север и юг
Мне нужно знать, сколько полюсов (см. вопрос) для выбора частоты
Посмотрите паспорт двигателя, снимите крышку и посчитайте. Трехфазный, 6,9,12,15,18 может быть.
Трехфазные двигатели – это бесполюсные двигатели. У них нет четких полюсов – просто посмотрите на статор. Именно поэтому их магнитное поле вращается.
Третья группа асинхронных двигателей – это те, в которых ротор вращается вокруг себя три тысячи раз за одну минуту. Фактическое число оборотов составляет 2900-2970.
Устройство и принцип работы трехфазных электродвигателей
В данной статье рассматриваются следующие вопросы:
- Конструкция трехфазного электродвигателя.
- Принцип работы трехфазного электродвигателя.
Конструкция электродвигателя 380 В
Асинхронные электродвигатели с короткозамкнутым ротором являются наиболее распространенными среди трехфазных электродвигателей в промышленности, сельском хозяйстве и быту благодаря своей простоте, надежности и низкой стоимости. Поэтому мы рассмотрим его устройство и принцип работы на примере этого двигателя.
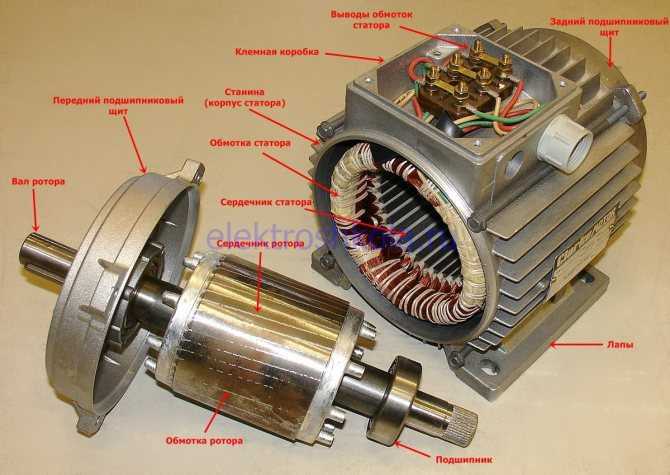
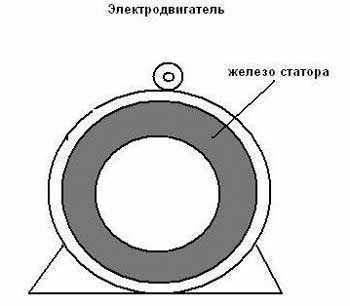
Асинхронный электродвигатель состоит из двух основных частей: статора и ротора.
Статор – это неподвижная часть электродвигателя. Он состоит из следующих компонентов:
- Рама (корпус), которая обычно имеет ребра жесткости для лучшего охлаждения, поскольку сердечник статора и обмотки нагреваются во время работы. Рама также оснащена ножками для защиты двигателя.
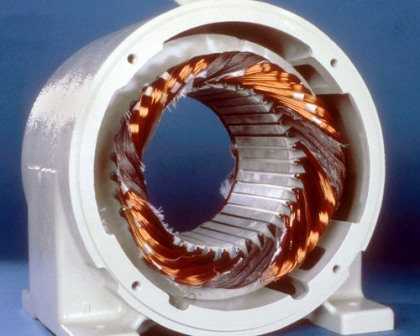
- Сердечник статора – изготовлен из отдельных листов электротехнической стали для снижения потерь на вихревые токи (токи Фуко), имеет зубчатую форму (пазы) и имеет следующий вид:
- обмотки статора – изготовлены из медных проводов, которые помещаются в пазы сердечника, концы обмоток выводятся в клеммную коробку для подключения к сети.
Ротор – это вращающаяся часть электродвигателя. Ротор состоит из следующих компонентов:
- Вал – изготовлен из стали и служит для передачи механической энергии рабочему механизму.
- Сердечник ротора – установлен на валу, аналогично сердечнику статора, изготовлен из отдельных листов электротехнической стали
- Короткозамкнутые обмотки ротора обычно имеют короткозамкнутый тип, часто называемый “путевыми обмотками” из-за их внешнего сходства Короткозамкнутая обмотка ротора имеет следующий вид:
Ротор удерживается в центре статора подшипниковыми пластинами.
Принцип работы трехфазного электродвигателя
Принцип работы электродвигателя довольно прост и основан на принципе вращающегося электромагнитного поля.
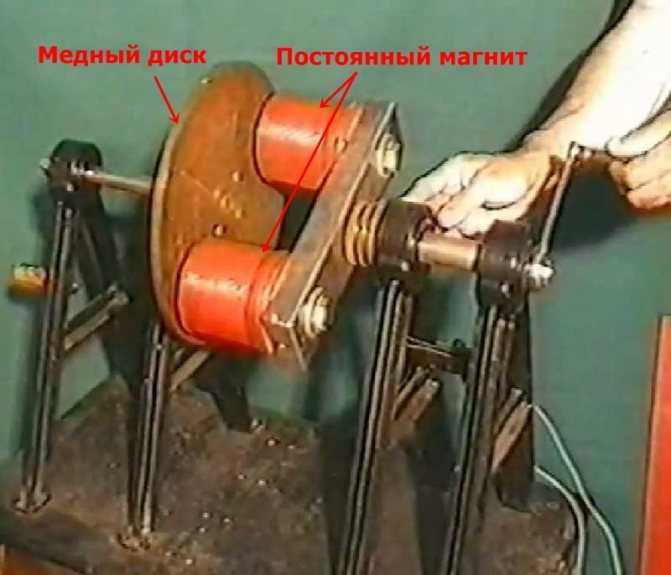
На рисунке выше показан медный диск, прикрепленный к валу на подшипнике напротив постоянного магнита. Если мы начнем вращать постоянный магнит, то его магнитное поле, пересекающее медный диск, также начнет вращаться, т.е. будет создано вращающееся магнитное поле, которое, согласно закону электромагнитной индукции, будет создавать индукционные токи в медном диске. Эти токи, протекая через диск, создают собственное электромагнитное поле, которое, в свою очередь, взаимодействует с вращающимся магнитным полем постоянных магнитов, заставляя диск вращаться.
Трехфазный электродвигатель работает таким же образом, но со специальным расположением обмоток статора, которые смещены друг относительно друга на 120° в пространстве, такое расположение создает вращающееся электромагнитное поле, когда через него протекает трехфазный ток.
Видео, демонстрирующее воздействие электромагнитного поля вращающегося статора на металлическую цепь (в данном случае цепь представляет собой простой диск):
Вращающееся магнитное поле статора, воздействуя на обмотку ротора, вызывает в обмотке статора индукционные токи, которые, протекая через обмотку ротора, создают собственное электромагнитное поле, и взаимодействие этих полей вызывает вращение ротора.
Как и магнит, статор электродвигателя имеет полюса, но в отличие от постоянного магнита, в электродвигателе может быть более двух полюсов, всегда с четным числом. Количество полюсов в статоре напрямую влияет на скорость вращения магнитного поля и, следовательно, на скорость вращения ротора. Скорость вращения магнитного поля (синхронная частота) определяется по формуле:
n=60*f/p
где: f – частота тока в станах СНГ 50 Гц (герц); p – количество пар полюсов.
Чем больше полюсов имеет двигатель, тем ниже частота его вращения. В качестве примера рассчитаем частоту вращения электродвигателя с четырьмя полюсами:
Четыре полюса представляют собой соответственно 2 пары полюсов:
Т.е. синхронная скорость магнитного поля статора составляет 1500 об/мин, а скорость ротора будет несколько ниже, т.е. 1400-1450 об/мин.
Относительная величина отставания скорости вращения ротора от скорости вращения магнитного поля статора называется скольжением, выражается в процентах и задается формулой:
S=(n1-n2)/n1*100%
где: n1 – синхронная скорость, об/мин; n2 – скорость вращения ротора (асинхронная скорость), об/мин.
Видеоролик, описывающий устройство и принцип работы трехфазного асинхронного электродвигателя с короткозамкнутым ротором:
Заинтересовала ли вас эта статья? А может быть, у вас все еще есть вопросы? Пишите в комментариях!
Вы не нашли статью по интересующей вас теме тема, связанная с электротехникой? Пишите нам сюда. Мы ответим вам.
где: Δtism – абсолютная погрешность длительности временного импульса (от нестабильности генератора опорной частоты); пх – измеренная скорость; тизм – длительность временного импульса (в нашем примере это 1 секунда).
Определение технических характеристик асинхронного двигателя
В данной статье рассматривается расчет параметров асинхронного двигателя, которые не указаны на заводской табличке двигателя, а именно: количество пар полюсов (количество пар катушек на фазу), скольжение при номинальной нагрузке, полная мощность, активная мощность и потери в двигателе при номинальной нагрузке.
На заводской табличке асинхронного двигателя с короткозамкнутым ротором типа AIR71V4U2 приведены следующие символы:
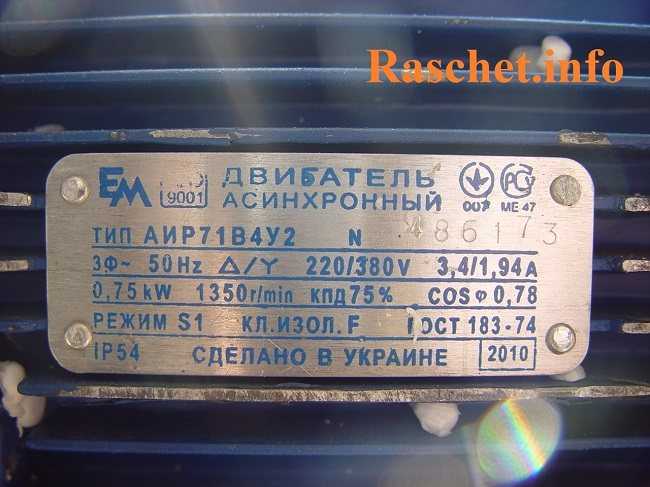
- ∆/Y – схема подключения обмотки двигателя;
- 220/380 В; 3,4/1,94 А – при схеме соединения треугольником обмотки статора должны быть подключены к 220 В, при схеме соединения звездой обмотки статора подключаются к 380 В, соответственно, и переменный ток составит 3,4 А для соединения треугольником при напряжении 220 В, и 1,94 А для соединения звездой.
Фактические данные можно проверить с помощью формул:
Для дельта-соединения:
Для соединения звездой:
- 0,75 кВт – номинальная (полезная) мощность;
- n2 = 1350 об/мин – частота вращения электродвигателя при номинальной нагрузке в минуту;
- КПД = 75 % – коэффициент полезного действия, характеризует отношение номинальной (полезной) мощности, развиваемой на валу, к активной мощности, которую он потребляет из сети. Он определяется по формуле:
- sosϕ = 0,78 – коэффициент мощности; чтобы рассчитать его, просто разделите активную мощность P на полную мощность S:
Уточнив технические данные, указанные на заводской табличке двигателя, переходим непосредственно к определению значений, о которых шла речь в начале статьи.
1. определите количество пар полюсов по формуле:
Если вам нужно узнать количество полюсов, формула будет выглядеть следующим образом:
Где: f = 50 Гц – частота переменного тока;
Определите скольжение при номинальной нагрузке:
где: n1 – синхронная скорость двигателя в зависимости от числа пар полюсов, так для одной пары полюсов – 3000 об/мин, для двух пар – 1500 об/мин, для трех пар – 1000 об/мин.
3. Определите полную мощность двигателя при номинальной нагрузке.
4. определить активную мощность, потребляемую двигателем при номинальной нагрузке:
5. определите потери в двигателе при номинальной нагрузке:
Поделиться в социальных сетях
Если вы нашли ответ на свой вопрос и хотите отблагодарить автора этой статьи за его труд, вы можете воспользоваться платформой перевода средств “WebMoney Funding”.
Этот проект поддерживается и развивается исключительно на средства добровольных пожертвований.
Проявляя свою лояльность к сайту, вы можете пожертвовать любую сумму денег, таким образом вы поможете улучшить сайт, увеличить регулярность появления новых интересных статей и оплатить постоянные расходы, такие как: оплата хостинга, доменное имя, SSL сертификат, зарплата наших авторов.
В этом примере я буду рассчитывать ток утечки в сети при выборе УЗО для защиты водонагревателя.
В этой статье я рассмотрю 2 примера определения падения напряжения на воздушной линии 10 кВ.
Основная задача токоограничивающего дросселя (далее – реактора) – ограничить ток короткого замыкания ниже дросселя, при.
Согласно техническому заданию на проектирование подстанции 110/35/10кВ “Радуга”, расположенной в АР.
Я хотел бы представить таблицу с расчетными формулами для определения основных параметров мощности.
Отправляя это сообщение, вы соглашаетесь на сбор и обработку персональных данных. Политика конфиденциальности.
Для этого метода регулирования используются преобразователи частоты. Если частота изменяется для поддержания постоянная магнитного потока (а для этого мы должны поддерживать постоянным отношение U/f), мы получаем семейство механических характеристик с одинаковой жесткостью и перегрузочной способностью.
Преимущества: плавное управление, отличная экономическая эффективность, возможность повышения частоты выше 50 Гц (частота сети).
Как выбрать электродвигатель?
Обмотка ротора
- Короткое замыкание ротора (беличья клетка)
- Ротор с фазной обмоткой: обмотка ротора намотана на контактные кольца, которые вращаются вместе с валом двигателя. В цепи ротора используются металлографитовые щетки для привода реостата. Этот реостат можно использовать для снижения пускового тока и регулирования скорости вращения вала двигателя.
Обмотка статора, напряжение питания
Обмотка статора может быть соединена звездой или треугольником.
Если на заводской табличке двигателя указано: 220/380, D/Yнаписано на заводской табличке двигателя, это означает, что двигатель может быть подключен к сети с напряжением Uл = 220 В в треугольной конфигурации, а при Uл = 380 В по схеме “треугольник”.
Двигатели IEC поставляются со стандартным напряжением 230/400 В, в то время как стандартное напряжение для отечественных двигателей составляет 220/380 В.
Размер
Размер рамы – это расстояние в миллиметрах “от пола” до вала двигателя. Отечественные (ГОСТ) и импортные (IEC, NEMA) двигатели обычно не совпадают по размерам – наши двигатели ниже импортных двигателей той же мощности.
Материал корпуса (рама)
- Алюминий
- Чугун.
Эффективность
КПД η – это механическая мощность на валу двигателя P2 к электрической мощности P1.
Выходная мощность равна только входной мощности.
Класс эффективности
- EFF1 (высокоэффективные двигатели)
- EFF2 (Эффективные двигатели)
- EFF3 (двигатели с обычным КПД).
Варианты монтажа
- Ножки вставляются в корпус или крепятся болтами.
- Фланец с выбитыми (малые фланцы) или сквозными отверстиями (большие фланцы).
- Комбинация лап и фланцев.
Защита корпуса двигателя IP
Класс защиты двигателя IP55 является стандартным.
Скорость вращения
Скорость вращения магнитного поля двигателя (синхронная скорость):
n1 = 60f / p [об/мин],
где p – количество пар полюсов двигателя,
f – частота сети (50 Гц).
- 2-полюсный двигатель – 3000 об/мин (стандарт).
- 4-полюсный – 1500 об/мин (стандарт)
- 6 полюсов – 1000 об/мин
- 8 полюсов – 750 об/мин
- 10 полюсов – 600 об/мин
- 12 полюсов – 500 об/мин
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля:
n2 = n1(1 – s),
где s представляет собой скольжение.
Многоскоростные двигатели – это двигатели, в которых ступенчатое изменение скорости осуществляется путем изменения числа пар полюсов.
Температура окружающей среды и высота над уровнем моря
При установке двигателя на высоте более 1000 м и работе при более высокой температуре окружающей среды необходимо рассмотреть возможность снижения мощности двигателя (derating) (для этого существуют специальные таблицы).
Тепловой класс изоляции
- B – 130° C
- F – 150° C (достаточно для работы с частотным преобразователем)
- H – 180° C
Номинальные параметры двигателя для всех классов изоляции приведены для температуры охлаждения +40°C.
Производительность
- S1 – непрерывный: двигатель работает при фиксированной температуре.
- S2 – кратковременный: двигатель не успевает достичь заданной температуры, но успевает полностью остыть при выключении
- S3 – прерывистый: работа с постоянной нагрузкой, чередующейся с отключением, при этом двигатель не успевает прогреться или остыть до постоянной температуры.
- S4 – Прерывистый с длительным запуском: двигатель не успевает прогреться или остыть до установившейся температуры
- S5 – Прерывистый при длительных перезапусках и электрическом торможении: Двигатель не нагревается и не охлаждается до установившейся температуры.
- S6 – Прерывистый: непрерывная работа под нагрузкой, чередующаяся с холостым ходом, при этом двигатель не прогревается и не охлаждается до установившейся температуры
- S7 – прерывистый с длительными запусками и остановками: двигатель не нагревается и не охлаждается до устойчивой температуры.
- S8 – прерывистый с прерывистым изменением скорости: двигатель не нагревается и не охлаждается до установившейся температуры
Тепловая защита двигателя
- Терморезисторы PTC – это резисторы, сопротивление которых кратковременно увеличивается при заданной температуре. От 1 до 3 термисторов соединены последовательно для сигнализации температуры срабатывания (Trip), например, 155°C. Другая цепочка термисторов может быть настроена на сигнал тревоги (Alarm), например, 145°C.
- Платиновые датчики температуры PT100 характеризуются высокой устойчивостью к окислению и высокой точностью измерений. PT100 может быть подключен в 2-, 3- или 4-проводной конфигурации (больше проводов означает меньше помех).
В обмотке статора можно установить от 3 до 6 датчиков PT100.
Для измерения температуры подшипника можно использовать дополнительно 2 датчика PT100. - KTY – кремниевые датчики температуры с положительным сопротивлением, характеризующиеся высокой линейностью, быстрым откликом, надежной полупроводниковой конструкцией и низкой стоимостью.
Коэффициент обслуживания
Двигатели с коэффициентом обслуживания 1,1 могут непрерывно работать в диапазоне до 10% от номинального выходного крутящего момента.
Класс крутящего момента
Класс крутящего момента представляет собой коэффициент умножения пускового момента (для прямого пуска от сети) при сниженном на 5% напряжении:
- Класс 16 – 160%.
- Класс 13 – 130%.
- Класс 10 – 100%.
- Класс 7 – 70%.
- 5 класс – 50%
Коэффициент мощности cos φ
Коэффициент мощности (cos φ) равен отношению активной мощности, потребляемой двигателем, к кажущейся мощности.
Активная мощность используется для выполнения полезной работы.
Видимая мощность равна геометрической сумме активной и реактивной мощности.
Реактивная мощность потребляется при намагничивании двигателя.
Антиконденсатное отопление
Существует два способа просушки обмоток перед запуском двигателя во влажном помещении:
- Используйте двигатель со специальным встроенным нагревателем
- Приложите напряжение от 4 до 10% от номинала обмотки статора (чтобы протекало от 20 до 30% номинального тока), достаточное для испарения конденсата (применимо не ко всем двигателям). Некоторые преобразователи частоты способны это делать.
Охлаждение
- Поверхностное охлаждение (невентилируемое: без вентилятора)
- Самовентиляция (вентилятор на валу двигателя)
- Принудительное охлаждение (принудительное охлаждение: независимый вентилятор или жидкостное охлаждение водой или маслом)
Для оборудования с турбинным приводом (вентиляторы и насосы, для которых крутящий момент на валу пропорционален квадрату скорости вращения), как правило, достаточно самовентиляции.
Двигатели, которые приводятся в действие преобразователями с постоянным крутящим моментом в течение длительного времени на низких скоростях, должны быть либо увеличенного размера, либо оснащены принудительным охлаждением.
Вентилятор
- Пластик
- Металл
- Металл с увеличенным моментом инерции
Требования к двигателям для работы с преобразователем частоты
- Класс температурной изоляции не ниже F
- Возможна принудительная вентиляция (см. выше)
- Изолированный подшипник на другом конце вала (рекомендуется для типоразмеров 225 и больше)
Подшипники
Если преобразователь частоты работает на частоте выше 50 Гц, срок службы подшипников сокращается.
В некоторых двигателях рабочая сторона вала оснащена плавающим подшипником, а нерабочая сторона – фиксирующим подшипником. В других случаях верно обратное (например, при соединении с коробкой передач).
В стандартной комплектации подшипники подпружинены в осевом направлении (вдоль вала) для обеспечения равномерной работы двигателя. Двигатели с радиально-упорными подшипниками не имеют такой пружины, поэтому всегда необходимо прикладывать радиальное усилие (перпендикулярное валу – например, от ремня), иначе подшипник быстро выйдет из строя.
Смазка
В целом, для двигателей типоразмера до 250, работающих на номинальной мощности, смазка рассчитана на весь срок службы подшипников.
На двигателе должен быть специальный ниппель для пополнения смазки.
Вал двигателя
Двигатель может иметь второй конец вала двигателя, который может передавать номинальный крутящий момент или меньший крутящий момент.
Другой конец вала несовместим с такими опциями, как датчик скорости и внешний вентилятор, возможно, тормоз.
Тормоз
При выборе тормоза следует обратить внимание на:
- Тип:
- статический (стопорный тормоз активируется только при неподвижном вале)
- Динамические (контролируемый тормозной момент, меньший износ в случае экстренного торможения)
Датчик скорости
Датчик скорости может быть герметично закрыт внутри корпуса (Incapsulated) или снаружи под защитным кожухом.
Вращающееся магнитное поле является фундаментальной концепцией в электродвигателях и генераторах.
Как самостоятельно проверить скорость вращения электродвигателя?
Часто, купив готовый электродвигатель, владелец автомобиля (и не только) позже обнаруживает, что на него нет никакой документации. В этом случае, как правило, необходимо самостоятельно определить скорость вращения электродвигателя, а многие, как показывает практика, не умеют этого делать. В этой статье вы узнаете, как самостоятельно определить скорость вращения электродвигателя и что об этом нужно знать.
Пошаговое руководство по определению числа оборотов
1. В настоящее время асинхронные электродвигатели делятся на три группы, каждая из которых определяет индивидуальную скорость вращения ротора в минуту. Первая группа – это электродвигатели, совершающие 1000 оборотов в минуту. Стоит сразу отметить, что эта цифра несколько преувеличена, так как двигатель является асинхронным.
Обычно он делает около 950-970 оборотов, но для удобства эксперты решили округлить эти цифры. Вторая группа – это двигатели со скоростью вращения ротора 1500 оборотов в минуту. Это число также округлено, на самом деле двигатель делает 1430-1470 оборотов в минуту.
Третья группа асинхронных двигателей – это группа, к которой относится деталь, ротор которой вращается вокруг себя три тысячи раз за одну минуту. Фактическое число оборотов составляет 2900-2970.
(2) Чтобы определить число оборотов электродвигателя, необходимо сначала определить, к какой из перечисленных выше групп он относится. Для этого откройте одну из крышек и найдите под ней катушку обмотки. Помните, что такая катушка может состоять из одной части или нескольких, особенно трех или четырех. Также следует учитывать, что в электродвигателе может быть более одной такой катушки. Вам нужен только один, к поиску которого вы должны приложить минимум усилий.
3 Предупреждение. Катушки соединены между собой определенными деталями, которые иногда мешают приему нужной информации. Ни в коем случае не отсоединяйте ничего друг от друга. Внимательно посмотрите на выбранную вами деталь и попытайтесь приблизительно определить размер катушки по отношению к кольцу статора.
(4) Это расстояние не обязательно должно быть точным для определения скорости вращения электродвигателя. Для вас подойдет приблизительный расчет.
Если размер катушки покрывает примерно половину кольца статора, скорость вращения ротора составляет три тысячи оборотов в минуту.
Если размер катушки охватывает около трети кольца, двигатель будет относиться ко второй группе, и, следовательно, количество оборотов, которые он может сделать, не превысит 1500 в минуту.
Когда размер катушки равен четверти кольца – число оборотов электродвигателя составит 1000 оборотов в минуту, а значит, двигатель будет относиться к третьей группе.
Обратите внимание, что приведенные цифры являются лишь приблизительными, в реальности они могут отличаться, и это зависит от многих факторов.
Эти статьи обязательно пригодятся и вам:
Теперь посмотрите это полезное видео:
- Техника японского ленточного цветка – Канзаши
Техника японского ленточного цветка. Для тех, кто видел такие красивые ленты канзаши, можно научиться их делать. Цветы из атласных лент – канзаши.
- Модульное оригами – схема складывания двойного лебедя
В этом уроке вы узнаете, что такое модульное оригами, а для изучения будет представлена схема складывания двойного лебедя.
- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Асинхронный электродвигатель – конструкция, принцип работы, типы асинхронных двигателей.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Принцип работы синхронного двигателя.
- Характерные неисправности электродвигателей и способы их устранения.
- Векторное управление вентильным двигателем в безредукторном сервоприводе – темы научных работ по электротехнике, электронике, информатике читайте бесплатно тексты научных работ в электронной библиотеке КиберЛенинка.