Схема 2 – Транзисторный ШИМ-регулятор скорости.
Регулятор скорости двигателя: изменение скорости и тиристорные схемы

Потребляемый электродвигателем ток превышает его пусковой ток в 7 раз, что приводит к преждевременному повреждению электрических и механических частей двигателя. Для предотвращения этого необходимо использовать регулятор скорости вращения двигателя. Существует множество заводских моделей, но чтобы изготовить такую модель самостоятельно, необходимо знать, как работает электродвигатель и как регулировать скорость вращения ротора.
Другой способ регулирования – пропуск полупериодов волны напряжения, но при частоте сети 50 Гц это будет ощущаться в двигателе – шум и рывки при работе.
Регулирование напряжения
Регулирование скорости таким образом заключается в изменении так называемого проскальзывание двигателя – это разница между скоростью магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 – скорость вращения магнитного поля
n2 – частота вращения ротора
Таким образом, высвобождается энергия проскальзывания, что приводит к нагреву обмоток двигателя.
Этот метод имеет небольшой диапазон регулирования примерно 2:1 и может быть использован только в сторону уменьшения – т.е. путем снижения напряжения питания.
При таком способе регулирования скорости необходимо устанавливать более мощные двигатели.
Тем не менее, этот метод часто используется для небольших двигателей с вентиляторной нагрузкой.
На практике для этого используются различные системы регуляторов.
Регулирование напряжения автотрансформатора
Автотрансформатор – это обычный трансформатор, но с одной обмоткой и отводом части витков. Гальваническая развязка от сети отсутствует, но в данном случае в этом нет необходимости, поэтому экономия за счет отсутствия вторичной обмотки налицо.
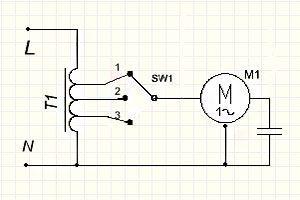
На схеме показан автотрансформатор T1, выключатель SW1к которым подключены выходы с разными напряжениями, и двигатель М1.
Регулирование осуществляется поэтапно, обычно не более 5 этапов.
 Преимуществами этой схемы являются:
Преимуществами этой схемы являются:
-
-
-
- неискаженная форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
-
-
 недостатки:
недостатки:
-
-
-
-
-
- большой вес и габариты трансформатора (в зависимости от мощности двигателя нагрузки)
- Все недостатки, связанные с регулированием напряжения
-
-
-
-


Тиристорное управление скоростью двигателя
В этой системе используются два тиристора в параллельном соединении (напряжение переменное, поэтому каждый тиристор пропускает разные полуволны) или симистор.
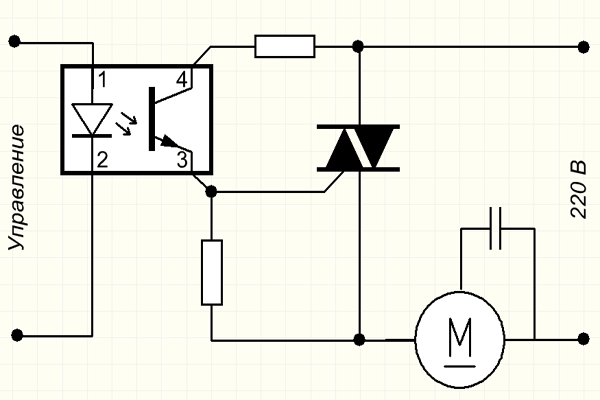
Схема управления регулирует моменты открытия и закрытия тиристоров по отношению к фазовому переходу через ноль, соответственно “отсекая” участок в начале или, реже, в конце формы волны напряжения.
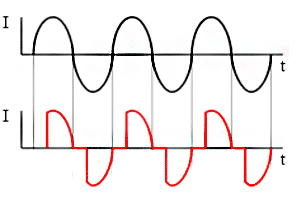
При этом изменяется среднеквадратичное значение напряжения.
Эта схема довольно широко используется для регулирования активных нагрузок, таких как лампочки и всевозможные нагревательные приборы (называемые диммерами).
Другой способ регулирования – пропуск полупериодов формы волны напряжения, но при частоте сети 50 Гц это будет ощущаться двигателем – шум и рывки при работе.
Для управления двигателями регуляторы модифицируются в связи с характеристиками индуктивных нагрузок:
-
-
-
-
-
- установить цепи защиты LRC для защиты выключателя питания (конденсаторы, резисторы, дроссели)
- добавить конденсатор на выходе для коррекции формы напряжения
- ограничение минимальной мощности регулирования напряжения – для гарантированного запуска двигателя
- использовать тиристоры с током, во много раз превышающим ток электродвигателя
-
-
-
-
Преимущества тиристорных контроллеров
-
-
-
-
-
-
-
- низкая стоимость
- малый вес и габариты
-
-
-
-
-
-
недостатки:
-
-
-
-
-
-
-
-
-
- может использоваться для небольших двигателей
- Во время работы могут возникать шум, треск, рывки двигателя
- При использовании симисторов на двигатель подается напряжение постоянного тока
- Все недостатки регулирования напряжения
-
-
-
-
-
-
-
-


Стоит отметить, что в большинстве современных кондиционеров среднего и высокого класса скорость вращения вентилятора регулируется именно таким образом.
Транзисторный регулятор напряжения
Как называет его сам производитель – электронный автотрансформатор или ШИМ-регулятор.

Изменение напряжения основано на принципе ШИМ (широтно-импульсной модуляции), а в выходном каскаде используются транзисторы – полевые или биполярные с изолированным затвором (IGBT).
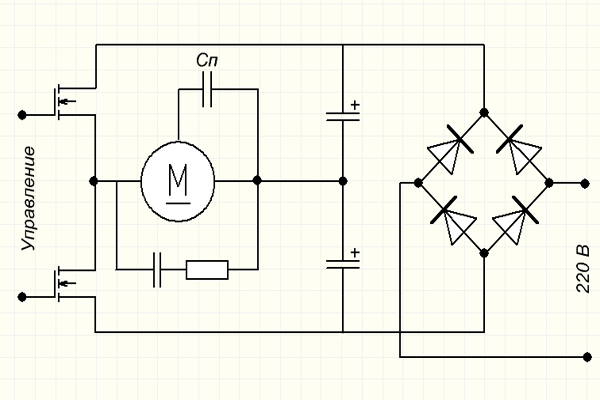
Выходные транзисторы переключаются на высокой частоте (около 50 кГц), и если изменяется длительность импульса и паузы, то результирующее напряжение на нагрузке также изменится. Чем короче импульс и чем больше время паузы между импульсами, тем ниже выходное напряжение и мощность.
При частоте двигателя в несколько десятков кГц изменение ширины импульса эквивалентно изменению напряжения.
Выходной каскад такой же, как и у частотного преобразователя, только для одной фазы это диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Преимущества электронного автотрансформатора:
-
-
-
-
-
-
-
-
-
-
-
-
- Малый размер и вес
- Низкая стоимость
- Чистая, неискаженная форма сигнала выходного тока
- Отсутствие шума на низкой скорости
- Управляется сигналом 0-10 вольт
-
-
-
-
-
-
-
-
-
-
-
Слабые стороны:
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- Расстояние от устройства до двигателя не более 5 метров (этот недостаток устраняется при использовании пульта дистанционного управления)
- Все недостатки регулирования напряжения
-
-
-
-
-
-
-
-
-
-
-
-
-
-
В выходных каскадах инвертора в качестве переключателей используются силовые транзисторы IGBT. По сравнению с тиристорами, они имеют более высокую частоту переключения, что позволяет получать выходной сигнал в синусоидальной форме с минимальными искажениями. Выходная частота I и выходное напряжение управляются высокочастотной широтно-импульсной модуляцией.
Регулирование скорости асинхронных двигателей
Наиболее распространенными методами регулирования скорости асинхронных двигателей являются: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подаваемого на обмотку статора, изменение частоты питающего напряжения и изменение числа пар полюсов.

Регулирование скорости асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора увеличивает потери мощности и снижает скорость вращения ротора двигателя за счет увеличения скольжения, поскольку n = n с (1 – s).
На рисунке 1 показано, что если сопротивление в цепи ротора увеличивается при том же крутящем моменте, то скорость вращения вала двигателя уменьшается.
Жесткость механической характеристики значительно уменьшается с уменьшением скорости, что ограничивает диапазон регулирования до (2 – 3) : 1. Недостатком этого метода является значительная потеря энергии, которая пропорциональна скольжению. Это регулирование возможно только для двигателя с фазным ротором.
 Регулирование скорости асинхронного двигателя путем изменения напряжения статора
Регулирование скорости асинхронного двигателя путем изменения напряжения статора
Изменение напряжения, подаваемого на обмотку статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока стандартного напряжения U 1nom и статором двигателя подключается регулятор напряжения.
При регулировании скорости асинхронного двигателя путем изменения напряжения, подаваемого на обмотку статора, критический момент M cr асинхронного двигателя изменяется пропорционально квадрату напряжения U ret (рис. 3), а скольжение не зависит от U reg.
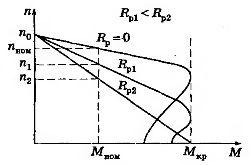
Рисунок 1. Механические характеристики асинхронного двигателя с ротором фазного типа с различными резисторами, включенными в цепь ротора

Рисунок 2: Схема регулирования скорости асинхронного двигателя путем изменения напряжения статора
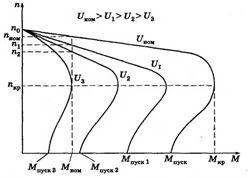
Рисунок 3: Механические характеристики асинхронного двигателя с изменяющимся напряжением, приложенным к обмотке статора
Если момент сопротивления приводимой машины больше, чем пусковой момент двигателя (Mc>Ms), двигатель не будет вращаться, поэтому двигатель должен запускаться при номинальном напряжении Unom или без нагрузки.
Скорость асинхронных двигателей с короткозамкнутым ротором можно регулировать таким образом, только если нагрузка приводится в движение вентилятором. Кроме того, необходимо использовать специальные двигатели с повышенным скольжением. Диапазон регулирования невелик, до n кр.
Для изменения напряжения используются трехфазные автотрансформаторы и тиристорные регуляторы напряжения.
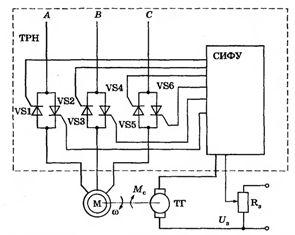
Рисунок 4. Схема замкнутого цикла управления скоростью тиристорного регулятора напряжения – асинхронного двигателя (TRN – AD)
Замкнутый контур управления двигателем тиристорного регулятора напряжения в системе двигатель – двигатель позволяет управлять скоростью вращения асинхронного двигателя с повышенным скольжением (такие двигатели используются в системах вентиляции).
Регулирование скорости асинхронных двигателей путем изменения частоты питающего напряжения
Поскольку скорость магнитного поля статора n o = 60 f /r, можно управлять скоростью вращения асинхронного двигателя, изменяя частоту питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно изменять угловую скорость n магнитного поля статора в соответствии с выражением при постоянном числе пар полюсов.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно изменять угловую скорость n магнитного поля статора в соответствии с выражением при постоянном числе пар полюсов.
Этот метод обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики характеризуются высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициент мощности, КПД, перегрузочная способность) необходимо одновременно изменять напряжение и частоту питания. Закон изменения напряжения зависит от характера момента нагрузки Mc. Если момент нагрузки постоянен, то напряжение статора должно регулироваться пропорционально частоте.
Принципиальная схема преобразователя частоты показана на рис. 5, а механические характеристики двигателя с частотным регулированием – на рис. 6.
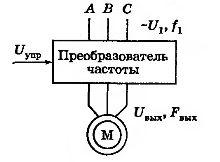
Рис. 5. Принципиальная схема частотно-регулируемого привода
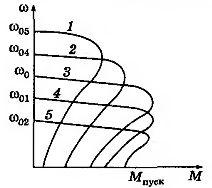
Рис. 6. Механические характеристики асинхронного двигателя с частотным управлением
С уменьшением частоты f критический момент немного уменьшается в диапазоне низких скоростей. Это связано с увеличением влияния сопротивления обмотки статора с уменьшением частоты и напряжения.
Частотное регулирование асинхронного двигателя позволяет изменять скорость в диапазоне (20 – 30) : 1. Метод частотного регулирования является наиболее перспективным способом управления асинхронным двигателем с короткозамкнутым ротором. Потери мощности низкие, так как потери на скольжение минимальны.
 Большинство современных преобразователей частоты основаны на схеме двойного преобразования. Они состоят из следующих основных частей: звено постоянного тока (неуправляемый выпрямитель), повышающий инвертор и система управления.
Большинство современных преобразователей частоты основаны на схеме двойного преобразования. Они состоят из следующих основных частей: звено постоянного тока (неуправляемый выпрямитель), повышающий инвертор и система управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Он преобразует напряжение сети переменного тока в напряжение постоянного тока.
Трехфазный импульсный силовой инвертор содержит шесть транзисторных переключателей. Каждая обмотка двигателя подключается к положительным и отрицательным клеммам выпрямителя с помощью соответствующего ключа. Инвертор преобразует выпрямленное напряжение в трехфазное переменное напряжение нужной частоты и амплитуды, которое подается на обмотки статора двигателя.
Силовые транзисторы IGBT используются в качестве переключателей в выходных каскадах инвертора. По сравнению с тиристорами, они имеют более высокую частоту переключения, что позволяет формировать выходной сигнал в синусоидальной форме с минимальными искажениями. Выходная частота I out и выходное напряжение управляются высокочастотной широтно-импульсной модуляцией.
Регулирование скорости асинхронных двигателей путем изменения числа пар полюсов
Шаговое регулирование скорости может быть достигнуто с помощью специальных многоскоростных асинхронных двигателей с короткозамкнутым ротором.
Из выражения n o = 60 f /p следует, что изменение числа пар полюсов p приводит к механическим характеристикам с различными скоростями n o магнитного поля статора. Поскольку значение p определяется целыми числами, переход от одной характеристики к другой в процессе настройки происходит постепенно.
Существует два способа изменения количества пар полюсов. В первом случае в пазы статора помещаются две обмотки с разным числом полюсов. При изменении скорости одна из обмоток подключается к сети. Во втором случае обмотка каждой фазы состоит из двух частей, соединенных параллельно или последовательно. В этом случае количество пар полюсов меняется дважды.
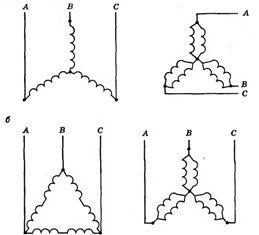
Рисунок 7: Схемы коммутации обмоток двигателя: a – с одной звезды на двойную звезду; b – с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов является экономичным, а механические характеристики остаются неизменными. Недостатком этого метода является ступенчатое изменение скорости асинхронного двигателя с короткозамкнутым ротором. Двухскоростные двигатели выпускаются с 4/2, 8/4, 12/6 полюсами. Четырехскоростной двигатель с 12/8/6/4 полюсами имеет две переключаемые обмотки.
Материалы из книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Если вам понравилась эта статья, пожалуйста, поделитесь ею в социальных сетях. Это очень поможет в развитии нашего сайта!
Ременные приводы имеют зубья с одинаковым шагом и профилем на внутренней стороне ремня и на поверхности обода. Они не проскальзывают, что позволяет передавать больше мощности.
Регулирование частоты
Специальные устройства, преобразователи частоты (другие названия: инвертор, частотный преобразователь, контроллер), подключаются к электрической машине. Выпрямляя напряжение питания, преобразователь частоты внутри генерирует необходимые значения частоты и напряжения и подает их на электродвигатель.
Инвертор рассчитывает необходимые параметры для управления двигателем в соответствии с внутренними алгоритмами, запрограммированными производителем.
Преимущества частотного регулирования
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- Обеспечивается плавное регулирование скорости вращения двигателя.
- Переменная скорость и направление вращения двигателя.
- Автоматическое поддержание необходимых параметров.
- Экономичная система управления.
-
-
-
-
-
-
-
-
-
-
-
-
-
-
Единственный недостаток, с которым можно смириться, – это необходимость приобретения частотного преобразователя. Цены на такие устройства совершенно заоблачные, за CU150 можно купить преобразователь для двигателя мощностью 2 кВт.
Симисторные регуляторы используются для регулирования скорости однофазных двигателей с напряжением питания 220 В.
Принцип работы регулятора скорости
Регулятор скорости – это устройство, состоящее из следующих трех основных подсистем:
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- Двигатель переменного тока;
- Контроллер главного привода;
- Привод и дополнительные компоненты.
-
-
-
-
-
-
-
-
-
-
-
-
-
-
Когда двигатель переменного тока запускается на полную мощность, ток посылается при полной мощности нагрузки, это повторяется 7-8 раз. Этот ток изгибает обмотки двигателя и выделяет тепло, которое будет вырабатываться в течение длительного времени. Это может значительно сократить срок службы двигателя. Другими словами, инвертор является своего рода понижающим преобразователем, который обеспечивает двойное преобразование энергии.
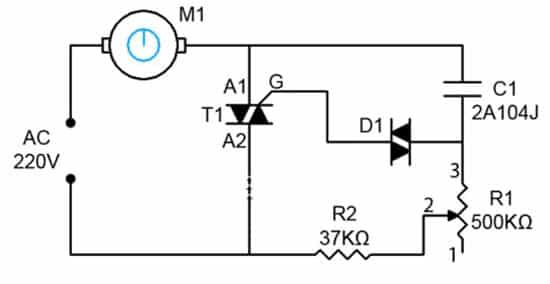
Рисунок – Принципиальная схема регулятора для коллекторного двигателя
В зависимости от входного напряжения частотный регулятор для трехфазного или однофазного двигателя выпрямляет ток 220 или 380 В. Это делается с помощью выпрямительного диода, который находится на входе питания. Затем ток фильтруется с помощью конденсаторов. Затем генерируется ШИМ, за что отвечает интегральная схема. Обмотки асинхронного двигателя теперь готовы принять импульсный сигнал и интегрировать его в желаемую синусоиду. Даже при использовании микромотора эти сигналы посылаются буквально пачками.
Как выбрать регулятор
Существует несколько характеристик, на основании которых следует выбирать регулятор скорости для автомобильных, машинных двигателей, бытовых приложений:
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- Тип управления. Для коллекторного двигателя существуют регуляторы с векторным или скалярным управлением. Первые используются чаще, но вторые считаются более надежными;
- Вместимость. Это один из самых важных факторов при выборе электрического преобразователя частоты. Выберите преобразователь частоты с мощностью, соответствующей максимально допустимой мощности защищаемого устройства. Однако для низковольтного двигателя лучше выбрать регулятор с мощностью, превышающей допустимую;
- Напряжение. Конечно, это дело индивидуальное, но если есть возможность, покупайте регулятор скорости для электродвигателя, схема которого имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – основная задача этого устройства, поэтому постарайтесь выбрать модель, которая наилучшим образом соответствует вашим потребностям. Допустим, для портативного маршрутизатора достаточно 1000 Герц;
- Другие характеристики. К ним относятся: срок гарантии, количество входов, размер (есть специальная приставка для настольных станков и ручного инструмента).
-
-
-
-
-
-
-
-
-
-
-
-
-
-
Хорошо зарекомендовавшими себя устройствами являются бренды Sinus, E-Sky и Pic.
Следует также понимать, что существует так называемый универсальный регулятор скорости. Это преобразователь частоты для двигателей без коммутатора.
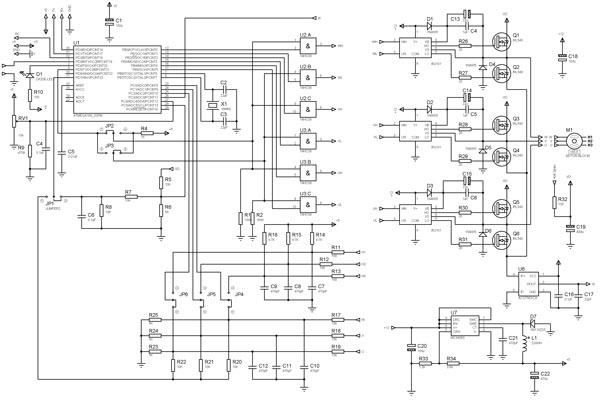
Фото – схема преобразователя частоты для безмутаторных двигателей
В этой схеме есть две части – одна – логическая часть, которая содержит микроконтроллер на микроконтроллерной ИС, а другая – часть питания. В основном, такая электрическая цепь используется для мощного электродвигателя.
Видео: регулятор скорости электродвигателя от Shiro V2
Подшипники расположены на валу ротора и помогают вращать его вокруг своей оси. Они прикреплены к внешней стороне корпуса двигателя. Шахта проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, она называется боковой нагрузкой.
Выбор устройства
Чтобы выбрать эффективный контроллер, важно учитывать характеристики устройства и его предполагаемое использование.
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- Векторные контроллеры распространены для коллекторных двигателей, но скалярные контроллеры более надежны.
- Важным критерием выбора является выходная мощность. Оно должно соответствовать предельному значению для используемого устройства. Еще лучше превысить его, чтобы обеспечить безопасную работу системы.
- Напряжение должно быть в пределах допустимых широких диапазонов.
- Основной задачей регулятора является преобразование частоты, поэтому этот аспект должен быть выбран в соответствии с техническими требованиями.
- Другие аспекты, которые необходимо учитывать, – это срок службы, размеры и количество входов.
-
-
-
-
-
-
-
-
-
-
-
-
-
-
Симисторное устройство
Симистор используется для управления освещением, мощностью и скоростью нагревательных элементов.
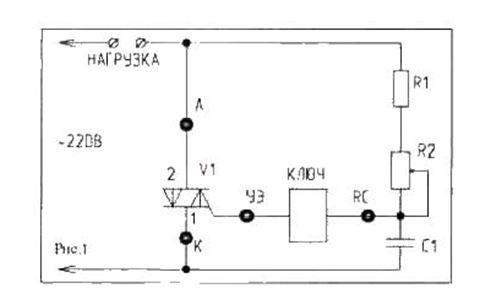
Схема драйвера симистора содержит минимум деталей, показанных на схеме, где C1 – конденсатор, R1 – первый резистор и R2 – второй резистор.
Инвертор используется для регулирования мощности путем изменения времени открытия симистора. Если он закрыт, конденсатор заряжается с помощью нагрузки и резисторов. Один резистор регулирует величину тока, а другой – скорость заряда.
Когда конденсатор достигает порогового напряжения 12 или 24 В, срабатывает ключ. Симистор переходит в открытое состояние. Когда напряжение в сети превышает ноль, симистор замыкается, и конденсатор заряжается отрицательно.
Читайте далее:- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Асинхронный электродвигатель – конструкция, принцип работы, типы асинхронных двигателей.
- Симистор. Принцип работы, параметры и схематические обозначения.
- Векторное управление вентильным двигателем в безредукторном сервоприводе – темы научных работ по электротехнике, электронике, информатике читайте бесплатно тексты научных работ в электронной библиотеке КиберЛенинка.
- Биполярные транзисторы.