На рисунке 3.8 показан пример противоточного пуска и торможения принцип действия. Во власти
Системы управления контакторными реле
Под “системами управления контакторными реле” подразумеваются системы логического управления, основанные на контакторных релейных элементах и предназначенные для автоматизации электродвигателей. С помощью системы RCCS автоматизированы следующие операции: включение и выключение двигателя; выбор направления и скорости вращения; запуск и торможение двигателя; создание кратковременных перерывов в движении; отключение защиты двигателя и остановка механизма. Эти операции необходимы для осуществления движения рабочего органа механизма в технологических условиях.
Непосредственным объектом управления для системы DCS является двигатель, работающий от сети. Привод, основанный на этом решении, представляет собой простой, нерегулируемый привод, предназначенный в основном для общепромышленного применения (например, краны, медленно движущиеся лифты, конвейеры, компрессоры, вентиляторы, насосы, некоторые виды транспортного оборудования и т.д.) Ниже приведены некоторые технические характеристики устройств релейного останова:
время реакции, с 0,005. 0,1
частота переключения, ч-1 :
для контакторов 600. 1200
для реле 1200. 3600
Потребляемая мощность, В – А:
Для контакторов 5. 50
Срок службы (общее количество коммутаторов) 10 6 . 10 7
Преимущества RSCC – гальваническая развязка цепей; значительная коммутационная способность; высокая устойчивость к помехам; возможность использования одного источника питания для силовых и управляющих цепей.
Недостатками RSCC являются: коммутация контактов, которая требует соответствующего обслуживания и ограничивает срок службы устройства; ограниченная скорость работы; повышенный вес и энергопотребление.
RSCC можно разделить на две части в зависимости от их функциональности: управление (формирование алгоритма управления, включая различные реле) и исполнительный, непосредственно выполняющие управляющие воздействия на двигатель (контакторы, магнитные пускатели). Система DCS состоит из типовых узлов, которые выполняют определенные функции. Кроме того, нестандартные узлы используются для решения конкретных технологических задач, например, защиты рабочего органа от пробуксовки приводного колеса, превышения скорости и т.д.
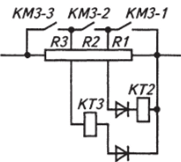
Рис. 3.6. Схема силовой части пускового узла по принципу времени
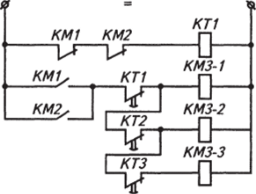
Рис. 3.7. Схема цепей управления пускового устройства с выдержкой времени
На рисунке 3.6 показан пример силовой части типичного трехступенчатого стартера с принцип времени. Пусковые резисторы Rl, R2, R3 цепи якоря двигателя постоянного тока переключаются контакторами K М3-1, КМ3-2, КМ3-3. Электромагнитные реле времени постоянного тока KT1, KT2, KTZ генерировать расчетную временную задержку для переключения пусковых резисторов, обеспечивая поддержание требуемого ускорения на постоянном уровне.
В цепи управления синхронизацией пускового устройства (рис. 3.7) вспомогательные контакты КМ1 и KM2 замкнуты, обеспечивая работу реле времени KT1, который размыкает свой контакт в цепи катушки магнитного пускателя КМЗ-1, подготовка системы к автоматическому запуску на основе времени работы одного из магнитных пускателей КМ1 или KM2.
На рисунке 3.8 показан пример противоточной системы пуска и торможения принцип действия. Во власти
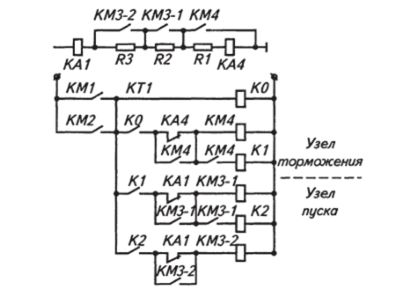
Рисунок 3.8: Схема токового пуска и торможения двигателя включает токовые пусковые реле CL1 и тормозные реле KA4. Когда контактор находится под напряжением КМ1 или KM2 тормозное устройство сначала активируется включением контактора KM4, который шунтирует тормозной резистор R1 и реле KA4. Замыкающий контакт KM4 в цепи контактора стартера позволяет стартеру работать. Промежуточные реле КО и К1 предотвращение подачи напряжения на катушки контакторов KM4 и КМ3-2 пока реле не будет полностью вставлено CL4 и KA1.
Наиболее важной типовой функцией RCCB является защита электрических и механических частей привода от неисправностей. Его задача – отключить двигатель от источника питания и остановить работу производственной машины. Режимы отказов в электрических цепях двигателя обсуждались ранее.
Режимы отказов в механической части электропривода. К. К отказам механической части электропривода относятся: превышение допустимого крутящего момента в механической передаче (заклинивание механизма); отсоединение рабочего органа (РЭ) от вала двигателя; превышение допустимой скорости вращения двигателя или РЭ; превышение допустимой зоны перемещения РЭ.
Перечень типичных режимов отказов и соответствующих средств защиты от них приведен в таблице 3.3.
3.3 Режимы отказов и меры защиты
Электрическая часть
Короткое замыкание; перегрев цепей питания
Высокоскоростные автоматические выключатели; предохранители; реле сверхтока; тепловые реле
Отключение питания; недопустимое пониженное напряжение в сети
Блокировка нейтрали; реле пониженного напряжения; реле перегрузки по току
Механическая часть
Временная перегрузка (заклинивание) машины
Муфта ограничения крутящего момента; предохранительный ключ
Соединение инструмента с валом двигателя.
Двойная тормозная система
Превышение допустимой скорости машины
Реле максимальной скорости
Перемещение заготовки за пределы допустимого диапазона перемещения
Безопасные выключатели
Электрическая часть
Короткие замыкания; тепловые перегрузки; автоматические выключатели; тепловые предохранители; реле сверхтока
Реле сверхтока; реле тепловой перегрузки
Отключение питания; блокировки; реле пониженного напряжения; реле пониженного напряжения
Механическая часть
Перегрузка крутящего момента Муфта ограничения крутящего момента; Гаечный ключ с предохранителем (заклинивание)
Взаимная тормозная система на валу двигателя
Привод превышает допустимый предел скорости Реле максимальной скорости рабочего элемента
Привод превышает допустимый диапазон хода Предохранительные выключатели
В конвейерных системах с активным моментом нагрузки защита от срабатывания при отказе обеспечивается установкой тормозной системы непосредственно на ДК.
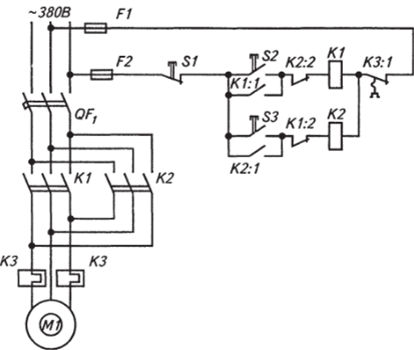
Рис. 3.9. Принципиальная схема изменения направления вращения асинхронного двигателя
Давайте поговорим о некоторых диаграммах, часто встречающихся на практике.
Реверсирование направления вращения асинхронного двигателя. Принципиальная схема для этого случая показана на рис. 3.9. Особенностью системы является наличие электрической блокировки, которая основана на размыкании блок-контактов. К1:2 и К2 :2 в силовой цепи катушек магнитного пускателя К1 и К2. При включении стартера Установите K1:2 – размыкающий вспомогательный контакт К1:2 разрывает цепь соленоида стартера К2, препятствует их сотрудничеству. Чтобы перевернуть двигатель, нажмите клавишу S1, это обесточит соленоид стартера. К1 и вспомогательный контакт К1:2, замыкается и подготавливает цепь для подачи напряжения на соленоид стартера К2. При нажатии кнопки S3 приведет в действие магнитный пускатель К2 и использует свои силовые контакты для подключения электродвигателя Ml к трехфазной сети переменного тока путем реверсирования чередования обеих фаз. Блочные контакты К2:2 Имеют ту же функцию в цепи, что и К1:2.
Динамическое торможение асинхронного двигателя. Работу схемы (рис. 3.10) можно разделить на два этапа: запустить асинхронный двигатель и динамическое торможение. На первом этапе автоматический переключатель управления горелкой QF1, Нажмите S2 (пуск), срабатывает контактор К1 и подключает двигатель Мл до от трехфазной сети и приводит в действие двигатель. Блок замыкающих контактов К1: 1 перемещает кнопку S2, Вспомогательный размыкающий контакт К1:2 разрывает цепь соленоида стартера К2, обеспечение электрической блокировки и третьего вспомогательного контакта К1: 3 подключает катушку реле времени KZ к источнику постоянного тока. Реле сработает и замкнет контакт KZ: 1 в цепи катушки К2включите стартер К2 не произойдет из-за разомкнутого нормально разомкнутого контакта К1:2.
На втором этапе нажимается кнопка 57 (стоп), которая отключает соленоид стартера. К7, который отключает двигатель от сети переменного тока. В то же время, вспомогательный контакт К1:1 деактивирует кнопку S2. Размыкание вспомогательного контакта К1:2 замыкается и активирует стартер К2У который соединяет обмотку статора с источником постоянного тока. С этого момента начинается динамическое торможение, продолжительность которого определяется временной задержкой реле KZ. Катушка реле времени РЕЛЕ КОРОТКОГО ЗАМЫКАНИЯ обесточивается вспомогательным контактом К1:3. По истечении времени задержки контакт KZ: 7 откроется и запустит цепь соленоида стартера. К2что приведет к отключению источника постоянного тока от обмотки статора и прерыванию динамического торможения.
Схема защищена от короткого замыкания в цепи питания миниатюрным автоматическим выключателем. QF1в цепях управления – предохранители FI, F2в цепях питания постоянного тока с помощью предохранителей F3, F4. Защита от перегрузки обеспечивается тепловым реле. К4. Электрическая блокировка обеспечивается размыкающими блок-контактами. К1:2 и К2:7. резистор R1 используется для управления постоянным током в режиме динамического торможения.
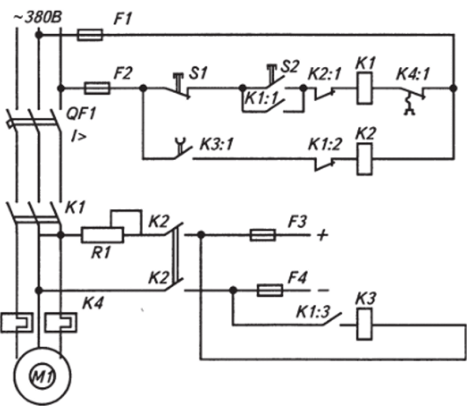
Рис. 3.10. Диаграмма динамического торможения асинхронного двигателя
Считайте, что на обмотку статора подается пониженное постоянное напряжение, исходя из того, что для максимального крутящего момента максимальный ток возбуждения будет в три раза превышать трехфазный ток холостого хода. Тогда напряжение возбуждения будет определяться произведением максимального тока возбуждения и активного сопротивления элементов цепи возбуждения.
Затем перейдите к для редактирования принципиальной схемы выбрав соответствующий пункт в меню слева внизу.
Установите опцию отображения электрической схемы по своему вкусу с помощью соответствующего меню. Для меня первый вариант более удобен, поскольку позволяет просматривать программу в привычном виде сверху вниз. Для инженеров-электриков, возможно, более удобен второй вариант, так как он максимально соответствует стандартным релейно-контактным схемам.
Простота автоматизации: легко программируемые реле
Добро пожаловать в уважаемое сообщество!
На Хабре уже было сказано много слов о различных устройствах автоматизации, от простых Arduino до промышленных многопроцессорных систем. Однако я хочу нарисовать еще одно белое пятно на карте hubro-automation статьей о промежуточных устройствах -. программируемые реле.В качестве примера я хотел бы использовать микропроцессорные устройства Easy от корпорации Eaton (Moeller).
Прошло много времени с момента моего первого контакта с устройствами этого типа, но до сих пор эти “электронные мелочи” остаются незаменимыми помощниками в широком спектре инженерных и бытовых работ.

Программируемое (интеллектуальное) реле – Разнообразные программируемые логические контроллеры (ПЛК).
Программируемые реле в основном используются как устройства автоматизации для местных цепей, отдельных машин и механизмов, для бытового применения.
Различные системы автоматического управления, такие как системы управления насосами, буровыми машинами и автоматическими системами передачи (ATS), основаны на интеллектуальных реле интуитивно понятным и простым способом. Компактные размеры и простота программирования позволяют создавать системы умного дома на основе программируемых реле.
Языки релейной логики (LD) или языки функциональных блоков (FBD), разработанные специально для инженеров по автоматизации промышленности и производства, являются стандартным способом описания и построения программ для этих устройств.
Простота языка программирования и легкость перехода от устаревших систем автоматизации на основе лестничных диаграмм к микропроцессорным устройствам позволили программируемым реле прочно закрепиться на рынке оборудования для автоматизации.
Теория
Реле как базовый оператор программирования
Как следует из названия описываемого класса устройств, основным рабочим элементом будет реле.
Реле – Электромеханическое устройство, используемое для переключения электрических цепей на заданное изменение электрических или неэлектрических входных величин. Классическое реле имеет управляющую катушку xи группа контактов, реализующих выходную функцию y=f(x).
Когда на вход катушки подается управляющее напряжение, контакты меняют свое исходное состояние на инверсионное.
Группа контактов может содержать два основных типа контактов: нормально разомкнутые контакты и Контакты N.O..
Нормально разомкнутый контакт – это контакт, который нормально разомкнут, когда на управляющую катушку не подается напряжение.
Нормально замкнутый контакт – это контакт, который нормально замкнут, когда на управляющую катушку не подается напряжение.
Таким образом, можно описать два основных типа функций, которые может выполнять реле:
y(x) = x – для нормально разомкнутых контактов;
y(x) = x̅ – для нормально замкнутых контактов.
Другие типы функций реле заключаются в придании дополнительных свойств группе контактов. Функции и типы контактов реле показаны на рисунке ниже.
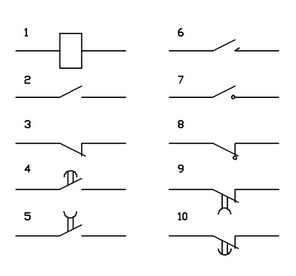
1 – катушка реле (цепь управления), 2 – нормально открытый контакт, 3 – нормально закрытый контакт, 4 – нормально открытый контакт с блокировкой при включении, 5 – нормально открытый контакт с блокировкой при возврате, 6 – нормально открытый импульсный контакт, 7 – нормально открытый контакт без самовозврата, 8 – нормально закрытый контакт без самовозврата, 9 – нормально закрытый контакт с блокировкой при включении, 10 – нормально закрытый контакт с блокировкой при возврате.
Элементы теории автоматических дискретных устройств
На сайте дискретное автоматизированное устройство является управляющим устройством, преобразующим априорную и текущую информацию в управляющую, причем носителями всех этих компонентов информации являются дискретные по уровню и времени сигналы. Это означает, что состояние сигнала на каждом входе (выходе) автоматизированного устройства характеризуется двумя уровнями: минимальным, условно обозначаемым как “0”, и максимальным, обозначаемым как “1”.
Проектирование контура управления в соответствии с заданными условиями эксплуатации называется синтез. Определение условий работы схемы или ее отдельных элементов на основе имеющейся структуры называется анализом схемы управления.
Схемы с релейными и бесконтактными элементами могут быть составлены двумя способами.
Первый способ Экспериментальный, который широко используется в практике логического составления релейных и бесконтактных схем. Исходя из заданных условий эксплуатации отдельных частей рабочей машины, составляется принципиальная схема системы автоматизации. Аналогично, бесконтактные аналоги релейно-контактных схем, в которых заданные условия работы схемы выражаются в виде функций булевой алгебры. Рекомендуется проводить минимизацию любой контактной или бесконтактной цепи, построенной таким экспериментальным способом. Минимизация схем осуществляется на основе законов булевой алгебры.
Второй метод построение (синтез) схем основано на более полном использовании алгебраической теории логики и принципов формализации реальных условий работы схемных автоматов. В этом случае из заданных условий работы исходим путем составления соответствующих таблиц состояний (карт функций), в которых отмечаем комбинации аргументов и значений функций (выходных сигналов) в виде логических “1” и “0”. Основной задачей синтеза является определение такого выражения требуемой логической функции, которое может быть реализовано с использованием минимального числа простейших возможных элементов. Синтез релейных систем управления сводится к структурной формуле (аналитическому выражению), описывающей логические функции, которые должны быть реализованы устройством. Затем проанализируйте полученную алгебраическую формулу и сделайте графический рисунок цепи.
Рассмотрение полного курса по теории логики и проектированию схем выходит за рамки данной статьи; любой заинтересованный может узнать больше об этом предмете, следуя ссылкам на литературу (в конце статьи).
Давайте рассмотрим процесс создания схемы управления на простом реальном примере.
Синтез схемы релейно-контактного управления на примере
Заявление о цели
Система управления освещением офиса должна быть спроектирована в соответствии со следующими условиями:
Дано
Офисное помещение с одной группой основного освещения (люминесцентные лампы) и одной группой стоячего и фонового освещения.
Жалюзи с электрическим управлением.
- В конце рабочего дня (18:15) выключите основную группу освещения и включите резервное освещение. Если жалюзи остаются закрытыми, убедитесь, что они открыты.
- Перед началом рабочего дня (8:45 утра) убедитесь, что рабочее освещение выключено.
- Если естественного освещения недостаточно, обеспечьте включение фонового освещения после сигнала датчика диммирования при условии, что жалюзи открыты.
- Убедитесь, что при закрытых жалюзи включено фоновое освещение. Если основное освещение было включено, выключите его.
- Убедитесь, что жалюзи автоматически опускаются при включении фонового освещения.
- Датчик освещенности имеет двоичный выход, который может быть настроен на определенный порог освещенности. Контакт замыкается при недостатке света.
- Система глухих приводов имеет контакты, которые указывают конечные положения.
Решение
Сначала определим переменную принадлежность входных и выходных сигналов проектируемой системы. Предположим, что все входные сигналы являются переменными I с соответствующим индексом, а все выходы с Q с соответствующим индексом.
Входные переменные:
I1 – Сигнал от датчика освещенности.
I2 – Сигнал верхнего положения жалюзи.
I3 – Сигнал нижнего положения жалюзи.
I4 – сигнал включения фонового освещения.
Выходные переменные:
Q1 – включение/выключение основной группы освещения.
Q2 – включение/выключение резервного освещения.
Q3 – включение/выключение фонового освещения.
Q4 – Поднять ставни.
Q5 – опускание рольставней.
Временные переменные:
T1 – достижение конца рабочего дня.
T2 – достижение времени начала рабочего дня.
Затем мы делим нашу задачу на условные части и создаем логические функции для каждой из них.
- Конец рабочего дня
- Выключение основного освещения: Q1=нет(T1).
- Включение постоянного света: Q2=T1.
- Откройте жалюзи, если они закрыты: Q4=not(I2)⋅T1
- Выключите постоянный свет: Q2=not(T2).
- Включите основное освещение с помощью датчика освещенности, проверяя, открыты ли жалюзи: Q1=I1⋅ I2⋅not(T1)⋅T2
- Включение фонового освещения при закрытых жалюзи: Q3=I3
- Выключение основного освещения при закрытых жалюзи Q1=not(I3)
- Когда включено фоновое освещение, закройте жалюзи, если это не конец рабочего дня: Q5=I4⋅not(I3) ⋅not(T1)⋅T2
Переход от функции булевой алгебры к релейно-контактной схеме очень прост. Просто представьте все входные и промежуточные переменные в виде контактов реле, а выходные функции – в виде катушек реле.
Отдельно следует сказать о переменных, зависящих от времени. В нашем примере это переменные, описывающие временной интервал рабочего дня, T1 и T2. Специальные типы реле – реле времени и таймеры – используются для представления переменных, зависящих от времени.Железо
Чтобы перейти к практической части нашей задачи, нам нужно посмотреть, какое оборудование лучше всего подойдет для нашей задачи. Производители предлагают довольно широкий ассортимент программируемых реле для оптимизации стоимости и функциональности определенных типов инженерных задач. Давайте попробуем разобраться в этом многообразии.
Программируемое реле обычно представляет собой моноблочную конструкцию с клеммами подключения питания, входами, выходами, ЖК-экраном и органами управления.- Клеммы подключения питания;
- клеммы для цифровых входов устройства;
- клеммы для аналоговых входов (0…10 В).
- Выходные клеммы для реле (или транзистора) в устройстве.
- ЖК-экран – для отображения информационных сообщений, редактирования программы, изменения параметров;
- клавиатура – для навигации по меню устройства;
- Интерфейсное гнездо для подключения кабеля программирования.
Источник питания для устройства
- устройства с питанием 12, 24 В (DC)
- 24, устройства с питанием 110-220 В (AC).
Цифровые входы
- устройства с входами 12, 24 В (постоянного тока);
- устройства с 24 входами 110-220 В (переменный ток).
Аналоговые входы
Для обработки аналоговых сигналов, например, от датчиков температуры, ветромеров, внешних потенциометров, программируемые реле Easy имеют два или более встроенных аналоговых входа 0…10 В (DC).
Обратите внимание, что аналоговые входы доступны только на устройствах с питанием 12 В (DC), 24 В (AC, DC).Релейные и транзисторные выходы
- Транзисторные выходы для коммутации малых нагрузок до 0,5 А
- Релейные выходы, позволяющие коммутировать нагрузку до 8 А (AC1).
Аналоговые выходы
Программируемые реле от Easy800 Серия Easy800 имеет аналоговые выходы (0…10 В).
Экран
Встроенный экран используется для отображения текстовой (серии Easy500, 700, 800) или графической информации (серия MFD-Titan).
Подключаемость и масштабируемость системы
Ethernet – Подключение через модуль расширения, выполняющий функции OPC-сервера. Для всего спектра устройств.
Profibus, CANopen, DeviceNet, As-i – Возможность подключения через модули расширения. Для серий Easy700, Easy800.
Easy-net – Позволяет подключать программируемые реле к сети. Для Easy800, MFD-Titan.
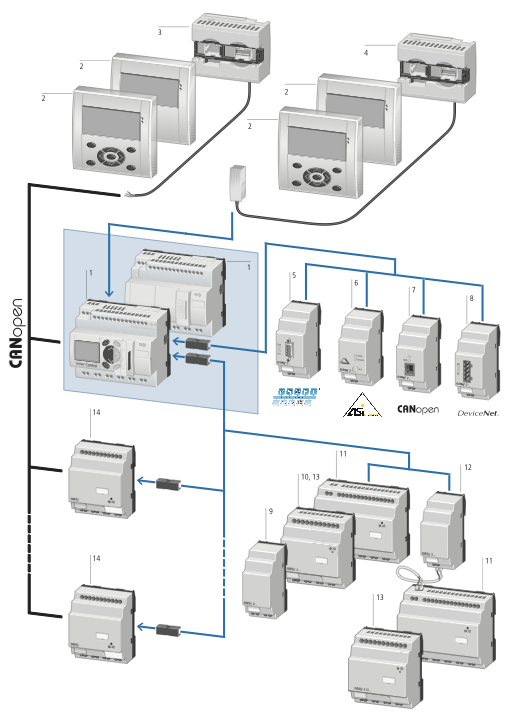
Для серий Easy700 и Easy800 имеются модули расширения, позволяющие увеличить количество входов и выходов. Модули расширения могут быть установлены один за другим, с помощью адаптера, или удаленно (до 100 м). Удаленная установка удобна, например, при реализации системы управления для двух помещений.
К одному программируемому реле Easy может быть подключен только один модуль расширения Easy.
Программируемые реле серии Easy800 оснащены интерфейсом Easy-net, который позволяет объединить в сеть до 8 устройств, каждое из которых может быть подключено к модулю расширения. Это позволяет иметь до 328 входов/выходов.
Простой ассортимент программируемых реле
К программируемым реле Easy относятся реле серий Easy500, Easy700, Easy800 и MFD-Titan.
Программируемые реле серии Easy 500
- Цифровые входные и питающие напряжения: 24 В и 100 – 240 В переменного тока, 12 В и 24 В постоянного тока.
- 8 цифровых входов.
- 2 аналоговых входа: 0 – 10 В (0 – 1023 бит), в версиях 12 В, 24 В постоянного тока и 24 В переменного тока.
- 4 релейных выхода: 8 A, или 4 транзисторных выхода: 24 В ПОСТОЯННОГО ТОКА/0,5 A.
- 128 “программных линий” с 3 контактами и 1 катушкой.
- Реле серии Easy500 не поставляются с модулями расширения.
Программируемые реле серии Easy700
- Напряжение питания и напряжения цифровых входов: 24 В и 100 – 240 В переменного тока, 12 В и 24 В постоянного тока.
- 12 цифровых входов.
- 4 аналоговых входа: 0 – 10 В (0 – 1023 бит), в версиях 12 В, 24 В постоянного тока и 24 В переменного тока.
- 6 релейных выходов: 8 A, или 8 транзисторных выходов: 24 В ПОСТОЯННОГО ТОКА/0,5 A.
- 128 “программных линий” с 3 контактами и 1 катушкой.
- Возможность подключения дополнительных блоков.
Программируемые реле серии Easy800
Самая современная и высокофункциональная серия Easy представляет собой гибкое решение практически для всех задач домашней и промышленной автоматизации. Серия Easy800 может быть расширена функциональными и коммуникационными модулями.
- Напряжение питания и цифровые входы: 24 В и 100 – 240 В переменного тока, 12 В и 24 В постоянного тока.
- 12 цифровых входов.
- 4 аналоговых входа: 0 – 10 В (0 – 1023 бит), в версиях 12 В, 24 В постоянного тока и 24 В переменного тока.
- 6 релейных выходов: 8 A, или 8 транзисторных выходов: 24 В ПОСТОЯННОГО ТОКА/0,5 A.
- 256 “программных линий” с 4 контактами и 1 катушкой.
- Встроенный интерфейс EasyNet для подключения к сети до 8 устройств.
- Возможность подключения дополнительных блоков.
Практика
Выбор устройства
Итак, мы имеем в виду почти все линейки устройств, знаем их основные характеристики. Осталось только выбрать подходящее программируемое реле для нашей задачи.
Поскольку наша задача достаточно тривиальна и не требует дополнительных коммуникационных и других возможностей устройства, мы применим простой алгоритм выбора подходящего программируемого реле Easy.- Определим количество цифровых входов. У нас есть 4 входные переменные I1…I4, поэтому достаточно иметь 4 входа в устройстве.
- Определите напряжение питания и тип цифровых входов. Поскольку мы планируем использовать программируемое реле для бытового применения, с питанием 220 В, 50 Гц, наиболее подходящим будет устройство, имеющее аналогичные требования к питанию и значения напряжения на цифровых входах – 220 В, 50 Гц.
- Определение типов и количества выходных контактов. Для управления 5 выходными переменными нам необходимо выбрать устройство с соответствующим количеством выходов. Поскольку выходы программируемого реле должны обеспечивать переключение источников света в офисе и других силовых устройств, у нас должны быть релейные выходы.
- 12 цифровых входов (220 В, 50 Гц);
- 6 релейных выходов (коммутация нагрузки до 8 А);
- часы реального времени;
- Электропитание – 110-220 В, 50 Гц.
среда программирования
- Контакты и катушки отображаются в соответствии со стандартами IEC
- Контакты и катушки отображаются в соответствии со стандартами ГОСТ;
- Контакты и катушки отображаются в соответствии со стандартами ANSI.
Программирование
Процесс написания программы для реле Easy сводится к “рисованию” схемы подключения реле к контактору в соответствии с полученными логическими функциями и определению необходимых параметров, таких как постоянные времени, значения таймера и т.д.
Запустите программу Easy-Soft и создайте новый проект.
Выберите нужный тип устройства из списка слева и перетащите его в окно проекта. Появится меню, позволяющее выбрать версию устройства. Из выпадающего списка выберите версию 10xxxxxxxxx – она соответствует кириллическим устройствам.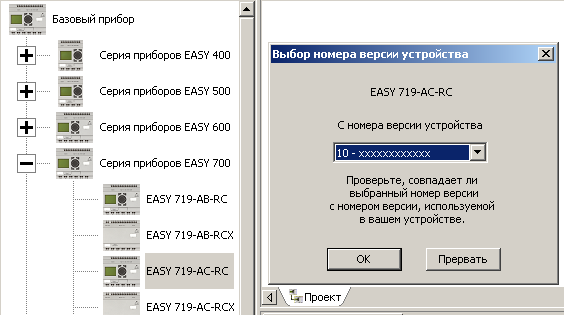
Затем перейдите к для редактирования схемы Затем перейдите к редактированию электрической схемы, выбрав соответствующий пункт в левом нижнем меню.
Используя соответствующее меню, установите предпочтительный вариант отображения схемы. Для меня первый вариант более удобен, так как позволяет просматривать схему в привычном виде сверху вниз. Для инженеров-электриков, возможно, второй вариант будет более удобным, поскольку он максимально соответствует стандартным релейно-контакторным схемам.
Давайте перейдем от логических функций системы управления освещением, которые мы синтезировали в разделе “теория”, к схеме реле-контактора. Для этого просто представьте все входные и промежуточные переменные в виде контактов реле, а выходные функции – в виде катушек реле.
Поскольку одна программная строка может содержать только 3 контакта и одну катушку, при необходимости необходимо ввести промежуточные переменные, чтобы разбить длинные логические функции. Промежуточные переменные называются маркеры в идеологии релейно-контактной схемы.Для определения конца и начала рабочего дня удобно использовать еженедельный таймер (H), который имеет гибкий режим работы в будние дни. Кроме того, использование недельного таймера позволяет использовать только одну переменную для определения границ рабочего дня.
Чтобы “нарисовать” релейно-контактную цепь, просто перетащите необходимые элементы из меню слева в рабочую область проекта. Элементы соединяются с помощью инструмента “карандаш”.
После добавления элементов в схему необходимо определить их доступные параметры. Давайте посмотрим, как это делается на примере недельного таймера.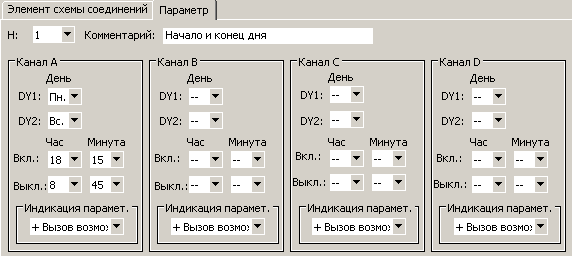
Недельный таймер предназначен для инициирования любого действия в течение недели в зависимости от установленных временных рамок. Таймер имеет 4 независимых канала A, B, C, D. Каждый канал может быть настроен на определенные временные интервалы. Например, в нашем случае конфигурация недельного таймера обеспечивает его срабатывание с понедельника по воскресенье, с 18-45 до 8-45.
Не лишним будет отметить, что наш пример относится к офисному зданию, где рабочие дни обычно с понедельника по пятницу.
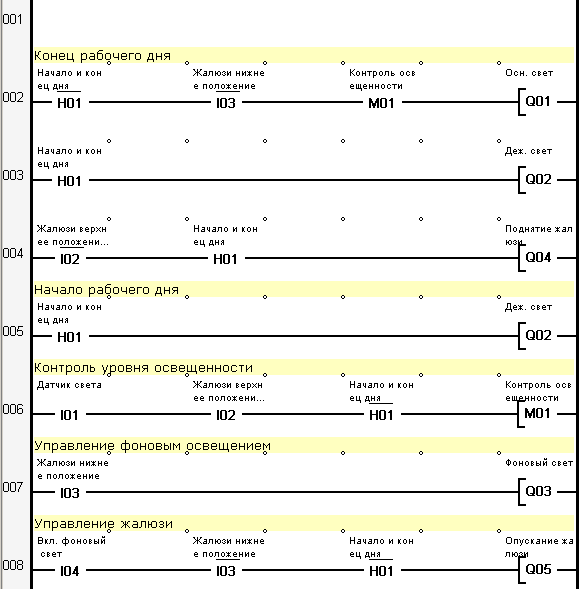
Окончательная схема реле и контактов в нашем примере
Отладка
После построения схемы реле и контактов удобно использовать режим отладки программы. Для этого просто перейдите в меню Моделирование.
Для моделирования доступны все входные и выходные сигналы устройства, а также все переменные программируемого реле.
Чтобы облегчить отладку – можно настроить тип входных сигналов. Например, при имитации положения шторы удобно установить соответствующий входной сигнал в качестве самоблокирующейся кнопки. Таким образом, его можно нажать один раз, чтобы зафиксировать его положение.
При использовании режима отладки текущее время моделируемого устройства является системным временем компьютера.Прошивка
Если у вас есть реальное физическое устройство, то после отладки схемы реле-контакт, вам нужно прошить его в программируемое реле. Для этого воспользуйтесь пунктом меню Общение. Думаю, нет необходимости комментировать отдельные пункты меню, поскольку они интуитивно понятны.
Проводка и монтаж системы управления
В реальных приложениях следующим шагом будет физическое подключение программируемого реле к приводам и механизмам, в нашем случае подключение к внутренней сети.
Следует признать, что, как и при любой другой разработке, системы на основе программируемых реле должны быть предварительно отлажены в виде сборочного макета. Это довольно просто, учитывая характер устройства и простоту подключения элементов управления и исполнительных механизмов.
При проектировании реальных систем управления необходимо соблюдать общие правила подключения программируемых реле. Подробную информацию о подключении см. в документации к устройству (в конце статьи).
- 8 A активная нагрузка (AC1) для устройств с релейными выходами;
- 0,5 A для устройств с транзисторными выходами.
При превышении допустимых нагрузок, например, для управления электрическим теплым полом, необходимо использовать промежуточные контакторы промежуточные контакторы. В этом случае нагрузка будет ограничена только мощностью промежуточного контактора.
Заключение
Надеюсь, что многие люди, которые не знали об описанном классе устройств, теперь имеют информацию и базовые знания, чтобы начать реализовывать свои идеи, которые, возможно, родились при чтении этой статьи.
Я надеюсь, что моя работа не была напрасной, и что эта информация будет полезна людям для реализации их инженерных идей на практике в промышленности и дома. С программируемыми реле Easy это действительно легко и весело!
Если сообщество Habro сочтет эту информацию интересной, в будущем я планирую подготовить серию статей о практическом применении описанных устройств в автоматизации и промышленности. Я расскажу о некоторых недокументированных возможностях программируемых реле Easy, например, как сделать графический интерфейс с возможностью мониторинга всех внутренних переменных. Да, вы абсолютно правы, на реле Easy можно построить диспетчерскую систему с графическим интерфейсом.
Полезная информация
[1] Википедия – Булева алгебра.
[2] Википедия – Карновы карты – методы минимизации булевых функций.
[3] Википедия – реле.
[4] Документация по программируемым реле серий Easy500 – Easy700.
[5] Документация по программируемым реле серии Easy800.
[6] Учебный центр Easy Relay – множество примеров применения программируемых реле Easy (русский язык).
[7] Программное обеспечение Easy relay (также доступно на русском языке).
[8] Веб-сайт производителя.
[9] Легко программируемый каталог реле.
[10] Легко – это легко. Руководство пользователя. О.А. Андрющенко, В.А. Водичев.Некоторые ссылки на документацию даны не с сайта производителя, а с сайта моей компании, поскольку после слияния Eaton и Moeller внутренние ресурсы перестраиваются и ссылки на документацию могут быть недоступны.
UPD 1. Добавлена литература [10] – справочник студента. Примеры, лабораторные работы.
UPD 2. Да, эти устройства можно программировать непосредственно со встроенной клавиатуры. Конечно, большие программы писать не очень удобно, но для быстрого редактирования схем – вполне можно использовать эту возможность.
UPD 3. ShadowHacker’s hubrunner предполагает, что правильнее использовать термины “нормально открытый контакт” и “нормально закрытый контакт” в терминах электротехники / электроники. В статье я оставлю оригинальную терминологию, поскольку в русскоязычной документации и каталогах устройства используются термины “нормально замкнутый контакт” и “нормально разомкнутый контакт”.Рис. 5 Схема системы автоматического запуска асинхронного двигателя с контактными кольцами
Управление релейными контакторами для двигателей
Назначение управления релейным контактором. Релейно-контакторное управление используется для автоматического дистанционного запуска, переключения скорости, остановки, реверсирования, торможения и защиты двигателя. Этот тип управления является открытой системой в том смысле, что он не включен в контур обратной связи.
В результате, возмущающее воздействие (например, изменение нагрузки на вал двигателя) изменяет целевой режим, т.е. вызывает изменение скорости вращения вала двигателя.
Системы с замкнутым контуром используются в сложных приводах, т.е. системах автоматического управления с обратной связью.
В таких системах заданный режим работы поддерживается при наличии возмущающих факторов (изменения нагрузки, напряжения питания и т.д.).
Представление релейно-контактных схем управления. Схемы управления реле и контакторами рисуются в виде составных схем или поэлементно (развернуто). В составных схемах все компоненты устройства размещаются на чертеже так, как они расположены в реальности. Сборочные диаграммы рисуются в виде комбинированных диаграмм. Комбинированные диаграммы громоздки и трудночитаемы. При проектировании электропривода используются подробные схемы, помогающие понять принцип работы системы. На расширенной схеме отдельно показаны компоненты силовой цепи и цепи управления, а также контакты и обмотки реле.
Контакты устройства показаны в положении, соответствующем состоянию без напряжения на обмотке. Соответственно, все контакты делятся на нормально разомкнутые или размыкающие (3) и нормально замкнутые или размыкающие (P).
Когда катушка обесточена, нормально разомкнутые контакты разомкнуты, а нормально замкнутые – замкнуты.
Схема управления и защиты асинхронного двигателя с использованием реверсивного магнитного пускателя. Магнитный пускатель состоит из одного или двух контакторов, установленных на общей опорной плите и помещенных в металлический корпус.
Пускатели обычно оснащены встроенным тепловым реле. Магнитный пускатель с одним контактором называется необратимым пускателем. Он используется для запуска, остановки и защиты двигателя от непреднамеренного запуска и перегрузки.
Магнитный пускатель с двумя контакторами называется реверсивныйВ дополнение к перечисленным выше функциям магнитный пускатель позволяет изменить направление вращения двигателя на противоположное. Рассмотрим работу реверсивного магнитного пускателя (рис. 4).
В стартере есть два контактора, один для запуска “вперед”. (Bp), а другой – для “обратного” запуска (Гц).
Двигатель защищен от токов короткого замыкания тремя предохранителями, а от перегрузок – двумя тепловыми реле: 1PT и 2PT. Обмотки статора двигателя подключаются к сети через предохранители, контакты контактора Bn или Hz и нагревательные элементы теплового реле 1PT и 2PT (для двух фаз).
При старте “вперед” схема работает следующим образом.
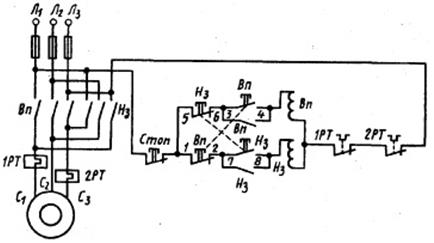
Рисунок 4 Схема магнитного реверсивного контактора
При нажатии кнопки Bn контакты 3, 4 замыкаются, и на катушку контактора Bn подается напряжение от L1 – Л3. Запускается контактор Bn и замыкаются контакты Bn силовой цепи, подключая обмотку статора к сети.
В то же время замыкающий контакт контактора Bn замыкается, и цепь кнопки Bn шунтируется. Это освобождает кнопку Bp. Чтобы остановить двигатель, нажмите кнопку STOP.
Это отключает напряжение от катушки контактора Bn, который размыкает свои главные контакты и отключает напряжение от обмотки статора двигателя. Одновременно размыкаются вспомогательные контакты Bp, которые шунтируют кнопку Bp. Схема работает аналогичным образом при запуске двигателя “в обратную сторону” после нажатия кнопки Hзза исключением того, что работает контактор Hc и порядок подключения фаз статора меняется на противоположный. Это изменяет направление вращения двигателя. Размыкающие контакты кнопки Bn 1, 2 и Hз 5, 6 размыкаются раньше соответствующих нормально разомкнутых контактов 3, 4 и 7, 8. Это обеспечивает их взаимную блокировку и предотвращает подачу напряжения на обмотки контакторов Bn и Hз в одно и то же время.
Система автоматического запуска асинхронного двигателя с контактными кольцами. Рассмотрим работу системы, показанной на рисунке 5.
Обмотки статора двигателя подключаются к сети через короткозамкнутые контакты сетевого контактора LK. Три одинаковых резистора, соединенных звездой, подключены к обмоткам ротора.
Система управления пуском состоит из реле ускорения 1U и 2U, реле ускорения тока 1PT и 2PT и реле времени PB.
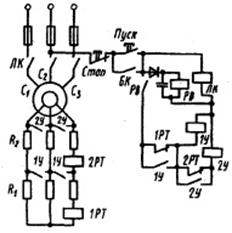
Рис. 5 Схема автоматического запуска асинхронного двигателя с контактным кольцом
При нажатии кнопки “Пуск” сетевое напряжение подается на контактор LK, контактор срабатывает, его главный контакт LK и вспомогательный контакт BK замыкаются. В результате на обмотки статора подается напряжение, и кнопка пуска блокируется. В фазных обмотках ротора двигателя возникают ЭДС и ток, и ротор начинает вращаться.
Из-за тока ротора, протекающего через сопротивление
 и обмотки реле 1PT и 1PT, эти реле срабатывают и размыкают свои контакты 1PT и 1PT. Одновременно с подачей напряжения на статор двигателя реле времени PM замыкает свои контакты через некоторое время после размыкания контакторов 1PT и 2PT, подготавливая цепь для подключения обмоток реле ускорения 1U и 2U.
и обмотки реле 1PT и 1PT, эти реле срабатывают и размыкают свои контакты 1PT и 1PT. Одновременно с подачей напряжения на статор двигателя реле времени PM замыкает свои контакты через некоторое время после размыкания контакторов 1PT и 2PT, подготавливая цепь для подключения обмоток реле ускорения 1U и 2U.По мере увеличения скорости вращения ротора его фазный ток уменьшается и достигает тока срабатывания реле 1PT, которое замыкает свои контакты и на обмотки реле подается напряжение.
Реле запускает и замыкает свои главные контакты, которые являются шунтирующими резисторами.
В результате ток в роторе ступенчато увеличивается, а реле 2PT продолжает держать свои контакты разомкнутыми. Вспомогательные контакты блокируют контактную цепь реле 1PT.
Скорость вращения ротора продолжает увеличиваться, а ток ротора уменьшается, достигая тока расцепления реле 2PT.
Контакты реле 2PT замкнуты, и напряжение подается на обмотку реле 2U. Реле активируется путем замыкания контактов 2U, которые шунтируют резисторы.
Контакты 2U замыкаются, блокируя контакты реле 2PT. Такая последовательность действий обеспечивает плавное ускорение двигателя.
ЛИТЕРАТУРА
1. Касаткин В.С., Немцов М.В., Электротехника. – Москва; Энергоатомиздат, 2000.
2 Основы промышленной электроники / под редакцией В.Г. Герасимова, М.: Высшая школа, 1985. 3.
Основы теории цепей; Пособие для старших классов. / В.П. Бакалов и др. Пересмотренное и дополненное издание 2. – М.; 2000.
4. Сборник задач по электротехнике и основам электроники / под редакцией В.Г. Герасимова / М.: Высшая школа, 1987.
5. 5. Прянишников В.А. Электроника. – СПб; Корона Принт, 2002.
6. 6. Хоровиц, П., Хилл, В. Искусство проектирования схем.- М.: Мир, 1997.
7. Амочаева Г.Г. Электронный конспект лекций.
1. Алексеенко А.Г., Шагурин Н.И. Микросхемы. Руководство для университетов: Радио и связь, 1990.
2) И.П. Жеребцов. Основы электроники – Л.: Энергоатомиздат, 1990.
3. Попов В.П., Основы теории цепей – учебник для вузов – 3-е изд. переработанное.- М.: Высшая школа, 2000.
4. Электротехника и электроника в экспериментах и упражнениях: Семинар по Electronics Workbench. В 2-х томах, под редакцией Д.И. Панфилова ДОДЕКА, 1999.-т.1-Электроника.
5. электротехника/Ю.М. Борисов, Д.Н. Липатов, Ю.Н. Зорин. Учебник для вузов, 2-е издание, М.: Энергоатомиздат, 1985.
При решении задачи используем признаки и маркировку рис. 4.27, б.
СХЕМЫ УПРАВЛЕНИЯ РЕЛЕ И КОНТАКТОРАМИ ДЛЯ ЭЛЕКТРОПРИВОДОВ С РАЗОМКНУТОЙ ЦЕПЬЮ
Релейные и контакторные схемы управления используются для реализации пуска, реверса и торможения двигателей и строятся с использованием электрических аппаратов ручного и дистанционного управления. Для автоматизации работы таких схем информация о скорости двигателя, ЭДС, угле поворота, токе и времени может быть получена от соответствующих датчиков. Рассмотрим работу типичных компонентов и цепей управления, опуская компоненты коммутации, защиты и сигнализации, рассмотренные в разделе 10.5. Обратите внимание, что устройства в цепях управления показаны в так называемом “нормальном” положении, когда они не подвергаются никакому управляющему воздействию.
Схема запуска двигателя постоянного тока с независимым возбуждением как функция времени. Эта диаграмма (рис. 4.27, а) содержит кнопки управления SB1 (начало) и SB2 (остановка двигателя, стоп), электромагнитный контактор КМ1который подключает двигатель к сети, и контактор ускорения KM2 – для отключения (короткого замыкания) пускового резистора /?д. В качестве датчика времени в схеме используется электромагнитное реле времени KT.
Когда схема подключена к источнику питания с напряжением U двигатель возбуждается, и реле времени KT, путем размыкания его размыкающего контакта в цепи катушки контактора
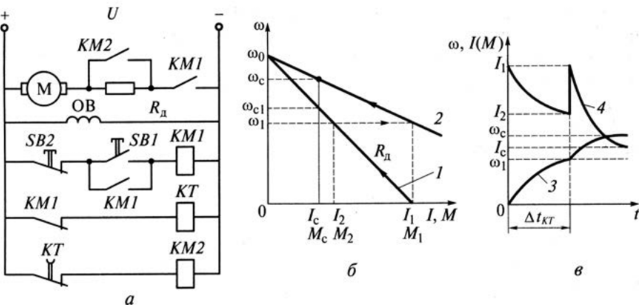
Рисунок 4.27: Диаграмма запуска одноступенчатого двигателя в зависимости от времени (a), механических характеристик (b), переходных процессов (c):
7 – реостат; 2 – естественные механические характеристики; 3 – скорость двигателя; 4 – ток и крутящий момент двигателя
KM2 и подготовка двигателя к запуску. Система принимает так называемую стартовую позицию.
Двигатель запускается, когда кнопка SB1, что приводит к тому, что катушка контактора KM1, который с помощью силового контакта подключает двигатель к источнику питания. Двигатель начинает разгоняться с помощью пускового резистора Яд в цепи якоря. В то же время замыкающий контакт контактора КМ1 выключить кнопку SB1 и может быть разблокирован, а вспомогательный размыкающий контакт КМ1 прерывает питание катушки реле времени KT.
После отсоединения катушки реле времени KT KT через промежуток времени AtKT его нормально разомкнутый контакт замкнется в цепи катушки контактора KM2, Контактор включится и своим главным контактом замкнет пусковой резистор. Яд в цепи якоря. Таким образом, когда двигатель запускается, в течение времени AtKT ускоряется благодаря искусственной характеристике 1 (Рис. 4.27, б), и за шунтирующим резистором Яд — естественным путём 2. Значение сопротивления резистора Ra выбирается таким образом, чтобы в момент пуска двигателя ток /, в цепи и соответственно момент Мх находится в допустимом диапазоне.
В то время, когда AtKT после фазы запуска двигатель достигает скорости cр и ток в цепи якоря уменьшается до /.2(Рис. 4.27, б). После шунтирования пусковой ток в цепи якоря увеличится с /2 в /, что не превысит допустимого уровня. Изменение скорости, тока и момента во времени происходит (без учета электромагнитной инерции обмотки якоря) по экспоненциальной зависимости и представлено кривыми 3 и 4 кривые на рис. 4.27, в.
Время изменения скорости от нуля до cр который определяет время удержания реле времени KT, можно вычислить из (2.35).
Диаграмма двухступенчатого запуска двигателя в зависимости от ЭДС и динамического торможения в зависимости от времени. В этой схеме (рис. 4.28, а) В качестве датчика ЭДС используется якорь двигателя, к которому подключены катушки ускоряющего контактора. КМ1 и KM2. Использование управляющих резисторов Rp2 и RpX Эти контакторы могут быть настроены на работу при определенных ЭДС (скоростях вращения двигателя).
Схема включает тормозной резистор R 3, который подключается к тормозному контактору и отключается от него КМЗ. Электромагнитное реле времени используется для обеспечения временной задержки KT, размыкающий контакт которого подключен к катушке тормозного контактора KM2.
Когда на цепь подается напряжение, двигатель возбуждается, а аппарат схемы управления остается в исходном положении.
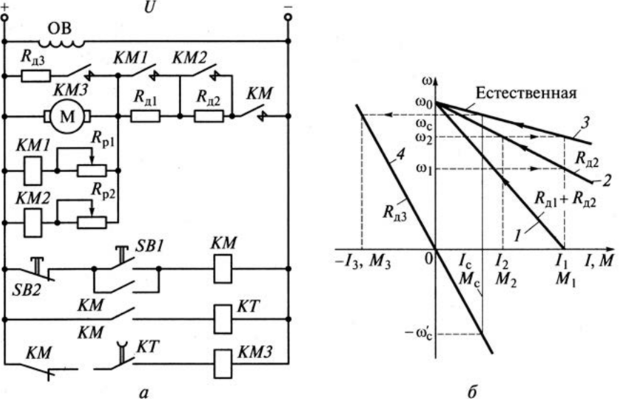
Рисунок 4.28: Диаграмма запуска ЭМП двухступенчатого двигателя и динамического торможения как функция времени (a) и механические характеристики (b):
1,2 – реостатный при запуске; 3 – естественный; 4 – реостатный при торможении
Двигатель запускается нажатием кнопки SB1, который активирует контактор KM и подключает двигатель к источнику питания. Двигатель начинает ускоряться на резисторах (Lд1 + Лд2) в цепи якоря в соответствии с характеристической кривой 1 (Рис. 4.28, б). При увеличении скорости вращения двигателя его ЭДС возрастает и, соответственно, увеличивается напряжение на катушках контактора. КМ1 и KM2. При скорости C0j включается контактор KM1, коротко замыкает первый каскад пускового резистора R . и двигатель работает по характеристической кривой 2. При скорости c2 контактор включается KM2 и закорачивает вторую ступень пускового резистора RrT Двигатель проходит через естественную характеристическую кривую 3 и заканчивает свой разбег в точке устойчивого состояния, определяемой пересечением естественного 3 двигателя и кривой нагрузочной характеристики z (Мс).
Диаграмма одноступенчатого пуска двигателя постоянного тока (ДПТ) как функция времени и динамического торможения как функция ЭДС
(рис. 4.29). Управление двигателем при запуске аналогично схеме на рис. 4.27. Обратите внимание, что когда двигатель включен и работает от сети, размыкающий контакт сетевого контактора KM в цепи тормозного контактора KM2 разомкнут, что предотвращает переключение двигателя в режим торможения.
Рисунок 4.29. Диаграмма одноступенчатого запуска двигателя как функция времени и динамического торможения как функция ЭДС
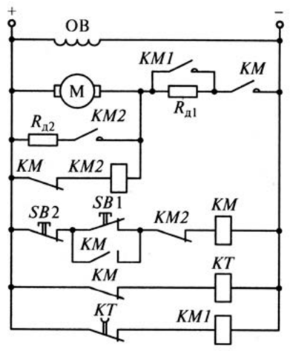
Торможение осуществляется нажатием кнопки SB2. Контактор КМ, отключает двигатель от напряжения питания и замыкает питание катушки контактора KM2. Последняя действует за счет наведенной ЭДС в якоре и замыкает якорь двигателя М на тормозной резистор /?д2. Процесс динамического торможения происходит до тех пор, пока при низкой скорости двигателя его ЭДС не станет меньше напряжения срабатывания контактора КМ2. KM2, Контактор отключится, и цепь вернется в исходное положение.
Схема управления пуском (DPT) как функция времени, реверсирование и торможение как функция ЭДС. В этой схеме (рис. 4.30, а) оснащен двумя контакторами КМ1 и KM2, которые позволяют двигателю вращаться в направлениях “вперед” и “назад”. Главные контакты этих устройств образуют инвертирующий мост, который может быть использован для изменения полярности напряжения на якоре двигателя М. В цепи якоря, помимо пускового резистора Rаль включается в цепь якоря, обратный резистор /?д2который используется для ограничения тормозного тока и управляется антикоммутатором КМЗ.
Управление двигателем во время торможения с помощью контрблокировки и реверса осуществляется двумя реле контрблокировки KV1 и KV2. Их функция заключается в обеспечении того, чтобы цепь якоря, кроме пускового резистора /?д1 токоограничивающий резистор счетчика R 2, что достигается выбором места подключения катушек реле KV1 и KV2 к резистору /?д1 + /?д2.
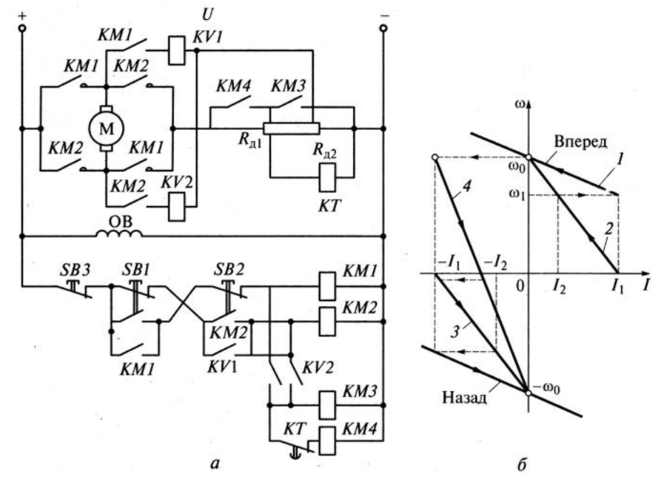
Рисунок 4.30. Диаграмма пуска, торможения и реверсирования двигателя в соответствии с принципом ЭДС (o) и механическими характеристиками (b):
7 – естественный; 2 – реостат при запуске; 3,4 – реостатный при торможении
Двигатель запускается в обоих направлениях за один шаг в зависимости от времени. После нажатия кнопки eq. SB1 приводит в действие контактор КМ1 и подключает якорь М к источнику питания. Из-за падения напряжения на резисторе /?д1 от пускового тока срабатывает реле времени KT и размыкает свой контакт в цепи контактора KM4.
Включение КМ1 также активирует реле KV1, который замыкает свой рабочий контакт в цепи противоразрывного контактора КМЗ. Это активирует KMZ .что вызывает короткое замыкание резистора противотока /?д2 и одновременно катушка реле времени KT. Двигатель начнет разгоняться по характеристической кривой 2 (Рис. 4.30, б), И эстафета времени KT – начинает отсчет собственного времени задержки.
По истечении времени задержки реле KT замыкает свой контакт в цепи катушки контактора КМ, включается, коротко замыкает пусковой резистор /?д| и двигатель достигает своей естественной характеристической кривой 1.
Чтобы начать торможение, нажмите кнопку SB2, который отключает контактор КМ1, реле KV1, контакторы
KMZ и KM4 и контактор KM2. Напряжение на якоре двигателя меняет свою полярность, и двигатель переходит в режим торможения с двумя дополнительными резисторами в цепи якоря /?д1 и /?д2. Несмотря на замыкание контактов KM2 в цепи реле KV2реле не включится в результате вышеуказанной регулировки и тем самым предотвратит работу аппарата KMZ и KM4 и мостовые резисторы /?д| и /?д2.
Переключение двигателя в режим встречного разряда соответствует переходу от естественной характеристики к искусственной. 1 к искусственной характеристике 4 (Рис. 4.30, б). Во всем диапазоне скоростей 0 2 .
Вычислите значение сопротивления пускового резистора /?дТок и момент двигателя при запуске не превышают трехкратного номинального значения, а выдержка времени реле времени KT. KT.
При решении задачи используем характеристики и символы рис. 4.27, б.
1. определить номинальную скорость, которая является произведением расчетного коэффициента и магнитного потока двигателя, и скорость холостого хода двигателя:


2. рассчитайте номинальный крутящий момент и заданный пусковой момент, который будет равен трехкратному номинальному моменту при трехкратном пусковом токе:

3. Найдите подобие треугольников на рис. 4.27, б Скорость c,

4) Рассчитайте значение пускового резистора:

5. Найти механическую постоянную времени электропривода при работе на искусственной реостатной характеристике, скорость coс| двигателя на этой характеристической кривой, соответствующей моменту нагрузки и задержке реле времени KT:
В качестве примера рассмотрим схему подключения к сети асинхронного двигателя с короткозамкнутым ротором М с помощью магнитного пускателя КМ (рис. 1.1). Запуск и остановка двигателя осуществляется с помощью кнопок SB2 (“Пуск”) и SB1 (“Стоп”).
1.1 Легенда и принципиальные схемы
Электрооборудование и его компоненты представлены на электрических схемах графическими символами,
Электрооборудование и его компоненты представлены графическими символами в соответствии с национальным стандартом.
Обозначения наиболее распространенных электрических компонентов и оборудования приведены в Приложении A (Таблица A1).
Алфавитные коды электрических компонентов приведены в таблице A2 (Приложение A). Первая латинская буква кода отражает совокупную функциональную характеристику элемента схемы. Более подробные характеристики изделия могут быть представлены двухбуквенным кодом. Во многих руководствах и инструкциях для ясности и удобства восприятия используются буквенно-цифровые символы на русском языке, что не противоречит ГОСТу, который допускает использование символов на русском языке в дополнение к основному латинскому коду, если это способствует лучшему пониманию схемы (Приложение А, таблица А2). В данном руководстве используется комбинированная система обозначений.
Электрооборудование, промышленные установки и технологические комплексы могут работать совместно с силовыми, защитными, сигнальными и управляющими устройствами. Совокупность устройств и элементов, соединенных электрическими проводами, представлена на чертежах в виде электрических схем.
Электрические схемы делятся по назначению на структурные, функциональные, основные, схемы соединений и схемы взаимосвязей (или внешних соединений).
Принципиальные электрические схемы дают полное представление о компонентах, составляющих электроустановку, соединениях между ними и работе всех электрических цепей. Соблюдайте следующие правила при составлении электрической схемы:
– Пометьте компоненты на схеме в соответствии с графическими символами;
– для простейшей диаграммы проведите линии связи под углом 90 0 или кратным этому углу (иногда под углом
– представляют элементы устройства в обесточенном состоянии (отключенном)
– использование разнесенного представления, когда элементы одного устройства (соленоид стартера, контактор, реле и их контакты) могут быть расположены в разных частях схемы;
– при построении диаграммы широко используется линейный метод представления (в каждой линии элементы появляются один за другим);
– дать каждому элементу диаграммы уникальное “имя” в виде буквенно-цифрового изображения.
Таким образом, принципиальная схема в первую очередь основывается на разборчивости схемы.
В качестве примера рассмотрим схему подключения асинхронного двигателя с короткозамкнутым ротором М к сети с помощью магнитного пускателя КМ (рис. 1.1). Запуск и остановка двигателя осуществляется с помощью кнопок SB2 (“Пуск”) и SB1 (“Стоп”).
Рисунок 1.1: Схема асинхронной коммутационной цепи
Система оснащена защитой двигателя от короткого замыкания.
Он защищен от перегрузки тепловыми реле КК1 и КК2, встроенными в магнитный пускатель. Магнитный пускатель КМ состоит из катушки, трех силовых контактов и одного вспомогательного (блокирующего) контакта в цепи управления. Все компоненты стартера имеют одинаковое “имя” KM. Тепловые реле, хотя и встроены в тот же конструктивный блок, что и магнитный пускатель, имеют собственное “имя” – KK1 и KK2.
Когда в цепи установлено несколько компонентов одного типа (контакторы, пускатели, реле), им присваиваются номера, например, KM1, KM2 и т.д.
В некоторых случаях для облегчения восприятия схемы контакты, принадлежащие одному и тому же электрическому устройству, нумеруются. Например, буквенное обозначение KM1-2 (или KM1.2) следует читать: контактор номер один.
Правильное проектирование и анализ систем управления ЭТУ требует глубоких знаний технологического процесса, последовательности отдельных технологических операций, взаимных связей и кинематических зависимостей и элементов технологического оборудования.
Релейная и контакторная схема
Неотъемлемой частью электрооборудования являются системы, обеспечивающие управление режимом подачи топлива в печь, приводами установки, водоснабжением, подачей воздуха, защитной атмосферой и т.д. Системы управления по своей структуре, конструкции отдельных узлов и элементов часто оказываются значительно сложнее силового, механического и другого оборудования, органическое единство которого образует промышленный комплекс, называемый ЭТУ.
Правильное проектирование и анализ систем управления ЭТУ требует глубокого знания технологического процесса, последовательности отдельных технологических операций, взаимных связей и кинематических и технологических зависимостей элементов оборудования.
Все многообразие систем управления приводами ETU включает два больших класса систем, работающих по релейному или аналоговому принципу. Релейные системы, использующие релейно-контактные устройства или бесконтактные системы логического управления, характеризуются двумя фиксированными состояниями – контакты замкнуты или разомкнуты; соленоиды находятся под напряжением или без него; на выходе логического элемента есть или нет сигнала.
Аналоговые или бесконтактные системы характеризуются непрерывной функциональной связью между входными и выходными переменными, как отдельных компонентов, так и системы в целом.
Для управления приводами ETU широко распространены релейно-контактные, аналоговые и гибридные системы, содержащие элементы обоих классов,
Несмотря на большое разнообразие производственных механизмов, автоматизированный электропривод для них унифицирован либо полностью, либо по отдельным узлам. Существуют различные типы панелей управления с полным стандартным оснащением. Эти панели предназначены для приводов переменного и постоянного тока. Для удобства чтения схем управления все компоненты, входящие в комплекты, также стандартизированы.
Многие автоматические приводы управляются различными типами реле и контакторов. Автоматизация управления приводом значительно исключает возможность ошибок при запуске и торможении, повышает эффективность машины и облегчает работу обслуживающего персонала.
При составлении и изучении схем управления автоматическими приводами удобно использовать компонентные диаграммы, также известные как принципиальные или концептуальные диаграммы. Основной принцип этих диаграмм заключается в том, что отдельные компоненты одного и того же устройства, которые кинематически связаны или находятся в непосредственной близости, могут быть показаны в разных местах диаграммы компонентов. Этот метод облегчает чтение схемы и изучение последовательности работы и взаимодействия аппарата. На компонентных диаграммах все компоненты одного и того же аппарата обозначаются одной и той же буквой. Например, катушка линейного контактора и его силовые и блокировочные контакты могут обозначаться буквой p.
Если имеется несколько компонентов одного и того же назначения, используется буквенно-цифровое обозначение с использованием ряда натуральных чисел, например, /C/, K2, KZ (первое, второе, третье реле) и т.д. Все части одного и того же элемента (например, катушка и контакты контактора) идентифицируются одинаково.
Для удобства чтения, описания, монтажа, настройки и эксплуатации в схемах управления каждому элементу схемы присваивается номер. В цепях постоянного тока все соединения положительной полярности обозначаются четными номерами (2, 4, б и т.д.), а соединения отрицательной полярности – нечетными номерами (1, 3, 5 и т.д.). В цепях переменного тока силовые цепи обозначаются фазами (L7, A2, . B1, B2, . C/, C2), а цепи управления – четными и нечетными номерами.
При выполнении монтажных работ удобнее использовать электрические схемы, чем схемы соединений, которые иллюстрируют взаимное расположение электрических машин и оборудования. Их выходы на электрических схемах соединены между собой проводами, которые обозначены на чертеже так, как они должны быть при установке панели управления. Тип, сечение и расположение провода указаны на схеме.
Многие электрические приборы имеют контакты, которые используются для различных видов коммутации в электрических цепях. Существуют нормально разомкнутые и нормально замкнутые контакты. Нормально разомкнутый контакт в соленоидном устройстве – это контакт, который разомкнут, когда в катушке нет тока. В отличие от этого, нормально разомкнутый контакт при таких условиях замкнут. Для устройств без соленоидов, таких как кнопки и путевые выключатели, состоянием замыкания контактов считается такое, при котором на устройство не действует внешняя сила.
При использовании в цепях управления коммутационных устройств, электрическое состояние которых зависит от положения коммутационного элемента (универсальные выключатели, путевые выключатели, контроллеры управления и мощности и т.д.), диаграммы состояний этих элементов должны быть приведены в зависимости от положения коммутационного элемента, как показано в таблице 7.1.
Электрооборудование должно быть установлено в металлических шкафах для обеспечения безопасной эксплуатации и защиты от влаги, масла и пыли. Оборудование должно быть установлено таким образом, чтобы его можно было легко устанавливать, ремонтировать и обслуживать с минимальными капитальными затратами. Панели могут быть размещены на значительном расстоянии от производственного блока, где затем устанавливаются только устройства управления, такие как кнопки, пакетные переключатели, контроллеры и т.д. На производственном агрегате также могут быть установлены различные типы шинных и концевых выключателей. Все эти устройства надежно защищены крышками для предотвращения контакта, повреждения и загрязнения токоведущих частей.
Изолированные электрические кабели, ведущие от щитов управления к аппаратам, установленным в производственном блоке, прокладываются в стеклянных, виниловых или стальных трубах для защиты от механических повреждений и разрушающего воздействия влаги и масла на их изоляцию.
Металлические шкафы, защитные кожухи аппаратов, стальные трубы и другие нетоковедущие части электроустановок должны быть заземлены или занулены в соответствии с правилами техники безопасности.
Катушки контакторов и реле в цепях управления должны питаться напряжением 24-127 В для обеспечения безопасного обслуживания и большей надежности оборудования. Однако это решение не всегда может быть принято из-за сложности системы электропитания цепи управления и отсутствия подходящего оборудования. В СССР релейно-контактные устройства выпускаются с тяговыми катушками на 12, 24, 48, ПОЛ, 220 В, реже на 30, 60, 440 В постоянного тока и на 12, 24, 36, 110, 127, 220, 380 В переменного тока.
Составление и чтение электрических схем управления должно производиться после глубокого понимания технологического процесса и требований к режимам работы оборудования. Выбор основных устройств электропитания должен осуществляться на основе технологических нагрузок и режимов работы.
Схемы управления должны отвечать требованиям высокой надежности, безопасной эксплуатации и простоты. Выбор устройств одного типа должен осуществляться с учетом их конструктивных особенностей, способов монтажа и демонтажа. Использование самого современного оборудования и его умелое расположение обеспечивает минимальные размеры контрольных устройств. Надежность схемы управления и всего устройства в целом не всегда обеспечивается минимизацией количества используемых устройств, поскольку в схемах должны быть предусмотрены необходимые блокировки. Введение блокировочных цепей, с одной стороны, усложняет схему управления, а с другой – обеспечивает безопасное обслуживание, предотвращает случайное повреждение оборудования, запрещает выполнение определенных технологических операций без предварительного принятия необходимых мер и т.д.
Схемы управления должны обеспечивать гибкость и простоту использования. В каждом случае это достигается разными способами. Например, включение и отключение регуляторов напряжения (http://www.atsconvers.ru/catalog/158/) из разных мест технологической установки осуществляется путем переключения дублированных кнопок, как показано на рис. 7.1,а: переключатели S3- S4 соединены параллельно, а переключатели S1 и S2 соединены последовательно. Быстрое переключение с ручного на автоматическое управление часто обеспечивается с помощью универсальных переключателей путем разделения цепей ручного и автоматического управления по схеме, показанной на рис. 7.1.6. 7.1.6. Гибкость и удобство управления также обеспечивается соответствующим расположением аппаратуры и станций управления. При необходимости следует позаботиться о том, чтобы обеспечить возможность быстрой проверки цепей управления, чтобы убедиться, что они готовы к работе и что любые неисправности могут быть быстро обнаружены. Это достигается, например, путем разделения цепей питания и управления. Однофазные стабилизаторы в Москве (http://www.atsconvers.ru/) можно приобрести здесь.
При описании работы схемы управления кратко опишите характерные моменты технологического процесса, которым управляет схема. Затем укажите начальное положение схемы, опишите все режимы и порядок работы схемы в соответствии с порядком технологических операций. Если диаграмма содержит специальные режимы, их следует обсудить отдельно.
- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Контакторы и пускатели. Технические данные.
- Магнитный кардиостимулятор – это магнитный пускатель. Что такое магнитный пускатель?.
- Контакторы и пускатели. Проектирование, выбор, электрические схемы контакторов и пускателей.
- Зачем нужен контактор – советы электрика – Electro Genius.
- Тепловое реле.
- Обслуживание электромагнитных контакторов.