селсин – синонимы: 3 – autosyn (1) – diffsyn (1) – synchronizer (1) … Словарь синонимов
Селсин
Селсин – Индукционная машина в системе индуктивной связи. Селсинами (от англ. самосинхронизирующийся ) представляют собой электрические микромашины переменного тока с самосинхронизацией. Вместо передачи энергии селсины действуют как механические шестерни, но крутящий момент передается между валами магнитным потоком без прямого контакта с зубьями шестерен.
В различных отраслях промышленности, в системах автоматизации и управления часто возникает необходимость синхронного и фазово-согласованного вращения или вращения двух или более осей, не связанных механически (например, радиолокационные системы с вращающимися антеннами). Такие проблемы решаются с помощью синхронных систем связи.
Простейший сельсин состоит из статора с трехфазной обмоткой (соединение треугольником или звездой) и ротора с однофазной обмоткой. Два таких устройства электрически соединены друг с другом одинаковыми клеммами – статор со статором и ротор с ротором. На роторы подается одинаковое переменное напряжение. В этих условиях вращение ротора одного синхронизатора вызывает вращение ротора другого синхронизатора. Когда один синхронизатор (датчик синхронизации) поворачивается на определенный угол, в нем индуцируется ЭДС, отличная от исходной. Поскольку синхронизаторы (их роторы) соединены, та же ЭДС будет наведена в другом синхронизаторе (синхроприемнике), и он отклонится от своего первоначального положения на тот же угол в соответствии с правилом левой руки.
Подставляя значения ЭДС, принимая во внимание, что
Сельсины что такое
В различных отраслях промышленности, в системах автоматизации и управления часто возникает необходимость в синхронном и фазово-согласованном вращении или повороте двух или более осей, не связанных механически. Эти задачи решаются с помощью систем синхронного сцепления.
Существует два типа синхронных муфт: синхронного вращения (“электрический вал”) и синхронного вращения (“угловая передача”).
В простейшем случае “электрический вал” может быть реализован на двух одинаковых асинхронных двигателях с фазным ротором, обмотки статора которых питаются от одной сети трехфазного тока, а обмотки ротора соединены между собой (рис.5.1).
Рисунок 5.1: Схема “электрического вала”
Системы угловых передач реализуются с помощью специальных индукционных микромашин – селсинов. Селцины – это электрические микромашины переменного тока с самосинхронизирующимися свойствами.
Celsines выпускаются в трехфазном и однофазном исполнении. Трехфазные сельсины конструктивно не отличаются от асинхронных двигателей с фазным ротором. Однако они не завоевали большой популярности, в основном из-за неравномерности синхронизирующего момента при вращении ротора в поле и против тока.
Однофазные сельсины конструктивно похожи на небольшие синхронные машины, обмотки возбуждения которых питаются переменным током.
В системах автоматизации “угловая передача” реализуется двумя принципиально разными схемами: индикаторной и трансформаторной.
Индикаторная схема используется там, где на оси приемника имеется небольшой момент статического сопротивления (стрелка, шкала прибора и т.д.). В этом типе схемы сельсин-приемник работает под углом, задаваемым самим передатчиком.
Трансформаторная схема используется там, где ось имеет значительный резистивный момент. В таких схемах синхронный приемник управляет только мощным двигателем, который осуществляет вращение какого-либо механизма.
Строго говоря, в каждой схеме должен использоваться свой синхронизатор: индикаторный или трансформаторный, хотя один и тот же синхронизатор может работать в обоих.
§ 5.2 Конструкция синхронизатора
Сельсины состоят из статора и ротора. Они имеют одну обмотку возбуждения и три синхронизирующие обмотки, которые смещены друг относительно друга на 120 0 и соединены в звезду. Сельсины могут быть контактными или бесконтактными.
Рис.5.2 Конструктивные схемы контактных вставок
Магнитное расположение контактных силикатов может быть неявно полярным (рис.5.2, а) или явно полярным (рис.5.2, б, в). Обмотка возбуждения может быть расположена как на роторе, так и на статоре. Первая конструкция лучше, потому что в ней только два кольца вместо трех.
Основным недостатком контактного сельсина является скользящий контакт, переходное сопротивление которого может изменяться в довольно широком диапазоне. Это снижает точность передачи угла и уменьшает надежность систем синхронной связи.
Широко используются бесконтактные целины, которые лишены этого недостатка.
Рисунок 5.3: Конструктивная схема и магнитная цепь бесконтактного сельвина
Ротор-Р бесконтактного сельвина (рис. 5.3) состоит из двух стальных пакетов, разделенных немагнитным материалом – НМ (обычно алюминиевым сплавом). Пакеты роторов сформированы в продольном направлении. Статор состоит из сердечника – С и двух колец – К. В пазах статора находится синхронизирующая обмотка – ОС, которая выполнена по трехфазному типу. К кольцам примыкают пакеты внешнего магнитопровода – ВМ, одинаково заземленные в продольном направлении. Обмотка возбуждения выполнена в виде двух кольцевых катушек.
Магнитный поток, создаваемый обмоткой возбуждения, замыкается по пути, показанному на рис.5.3. От одного пакета ротора он проходит через небольшой воздушный зазор к статору – C. Затем он проходит половину пути вокруг задней части статора и выходит во второй пакет роторов. Отскакивая от косого зазора, он снова попадает в первый пакет роторов через кольцо – K и внешний магнитопровод – BM. При вращении ротора положение потока возбуждения относительно синхронизирующих обмоток меняется, поэтому наведенная в них ЭДС будет зависеть от угла поворота ротора, подобно контактному сельсину.
Недостатком бесконтактных селсинов является неполноценное использование активных материалов. Они весят примерно в 1,5 раза больше, чем контактные. Причиной этого являются большие воздушные зазоры, которые вызывают большие паразитные потоки и высокие токи намагничивания.
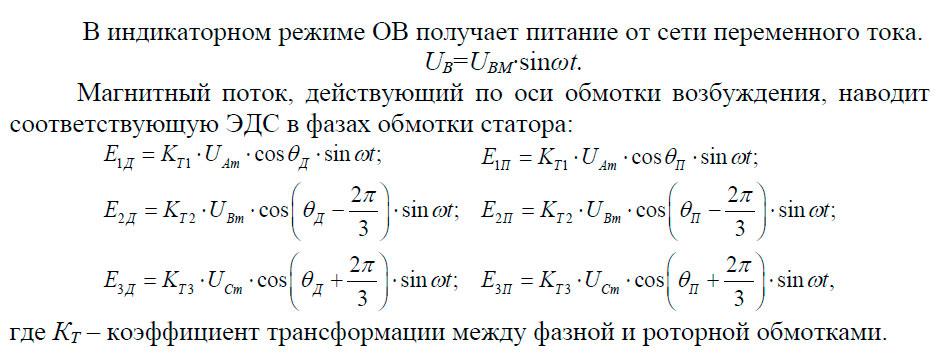
§ 5.3 Работа селцина в режиме индикатора
Схема индикаторной связи показана на рис. 5.4. Предположим, что обе селцины абсолютно одинаковы и что только один приемник питается от одного датчика.
Рис. 5.4 Схема индикатора передачи угла
Когда обмотки возбуждения преобразователя и приемника питаются переменным током, пульсирующие потоки возбуждения Фh и Fvnкоторые вызывают ЭМП (Eд1. Еп3). Величина каждой ЭДС зависит от углового положения соответствующей обмотки относительно оси возбуждающего поля. Если принять гармонический закон для распределения индукции магнитного поля, то:
Здесь Em-это максимальная ЭДС, которая может быть получена, когда синхронизирующая обмотка и обмотка возбуждения находятся в коаксиальной связи. Это видно на рис. 5.4, где показано, что в любой момент времени ЭДС одинаковых фаз преобразователя и приемника направлены в противоположные стороны. Если синхронизаторы находятся в согласованном положении, то ЭДС одинаковых фаз датчика и приемника равны по величине и уравновешивают друг друга.
Если датчик повернут на угол aд равенство ЭМП нарушено. В синхронизирующих обмотках и линиях связи протекают токи, которые, взаимодействуя с токами возбуждения, создают моменты, действующие одинаково на валы преобразователя и приемника. Поскольку преобразователь обычно фиксирован, приемник будет повернут в том же направлении и на тот же угол, поскольку только при совпадении положения ЭДС снова уравновешивается.
Найдем выражение для синхронизирующего момента селсина.
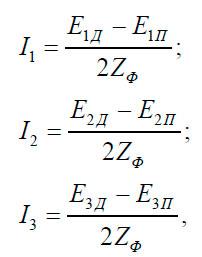
Поскольку одинаковые фазы преобразователя и приемника подключены в противоположных направлениях, ток, протекающий через них
где Zф-это полное сопротивление синхронной обмотки одного из сельсинов плюс половина сопротивления линии связи.
Подставляя значение ЭДС, учитывая, что
и обозначая разность углов поворота передатчика и приемника aд-aпна угол смещения q, получаем
Если один из сельсинов неподвижен, а другой повернут на угол от 0 0 до 360 0 , то зависимость токов от угла перекоса будет иметь вид, показанный на рис.5.5. Из формул для токов и рис. 5.5, 5.5 видно, что сумма токов равна нулю при любом угле перекоса элемента. Поэтому в линиях связи нет нулевого проводника.
Рис.5.5 Токи синхронизирующих обмоток в зависимости от угла рассогласования
Во время работы бесконтактного сельсина импульсный магнитный поток в магнитной системе замыкается накоротко. Он одновременно подключен к трехфазной синхронизирующей обмотке статора. Весь путь замкнутого магнитного потока отмечен на рисунке пунктирной линией.
Особенности конструкции
Синхронизация селсинов может быть контактной и бесконтактной. В первом случае связь между обмоткой ротора и внешней цепью осуществляется через щетки и контактные кольца. Конструкция контактных сельсинов напоминает асинхронный двигатель малой мощности с фазным ротором.
Статоры и роторы таких сельсинов по умолчанию считаются бесполюсными, а обмотки располагаются в шахматном порядке. Ротор имеет обмотку возбуждения, к которой через два контактных кольца подводится электрический ток. Некоторые типы имеют четко выраженные полюса статора и ротора, что значительно увеличивает их синхронизирующий момент.
В течение срока службы селсина контактные кольца постепенно изнашиваются и требуют замены. Этот фактор считается единственным существенным недостатком этих устройств. Бесконтактные сельсины, назначение и конструкция которых предполагают отсутствие контактных элементов, имеют две обмотки, расположенные на статоре. Сам ротор представляет собой цилиндр, изготовленный из ферромагнитного материала. Специальный алюминиевый слой разделяет ротор на два изолированных полюса.
На концах устройства имеются жилы, для которых используются листы электротехнической стали. Внутренняя поверхность этих сердечников располагается над ротором. Внешняя поверхность сцепляется с сердечниками внешнего магнитопровода.
Однофазная обмотка возбуждения представляет собой двухдисковую катушку, расположенную с обеих сторон статора, между обмоткой синхронизации и сердечниками.
Во время работы бесконтактного сельсина импульсный магнитный поток в магнитной системе замыкается накоротко. Он одновременно подключен к трехфазной синхронизирующей обмотке статора. Весь путь замкнутого магнитного потока отмечен на рисунке пунктирной линией.
При вращении ротора ось магнитного потока изменяет свое положение относительно синхронизирующих обмоток. Поэтому ЭДС, возникающая в фазах синхронизирующих обмоток, напрямую связана с вращением ротора. Таков принцип работы этих устройств.
Плохое и неэффективное использование активных материалов считается существенным недостатком бесконтактных селсинов. Вес таких моделей примерно в 1,5 раза больше, чем у контактных конструкций, в основном из-за значительных воздушных зазоров. В результате бесконтактные блестки имеют более высокие токи намагничивания и потоки рассеяния.
Схемы переключения доступны для обоих режимов:
Целсины
Целсины – это электрические микромашины, способные к самосинхронизации, используемые в индуктивно-синхронных системах связи в качестве датчиков и приемников. Слово “селсин” происходит от английского слова self-synchronising. Редукторы Selcine работают так же, как и обычные механические редукторы, но крутящий момент между валами создается не прямым контактом между шестернями, а переменным магнитным потоком.
Системы автоматизации и управления часто требуют синхронного и фазово-совместимого вращения или вращения двух или более осей, не связанных механически.
Сельсины имеют множество применений:
- 1. передача измерительной информации и команд на расстояние.
- 2. синхронизация передачи информации и команд на расстояние.
- 3. цифровое измерение и визуализация линейных и угловых перемещений движущихся частей машин и роботов.
- 4. полуавтоматическое управление исполнительными механизмами.
- 5. как системы слежения.
Сельсины – это индукционные электрические машины переменного тока. Статор и ротор сельсина выполнены в виде магнитопроводов специальной конструкции. Для снижения потерь они изготавливаются из тонкой электротехнической стали. Обмотка возбуждения (первичная обмотка) и синхронизирующая обмотка (вторичная обмотка) расположены в пазах статора и ротора.
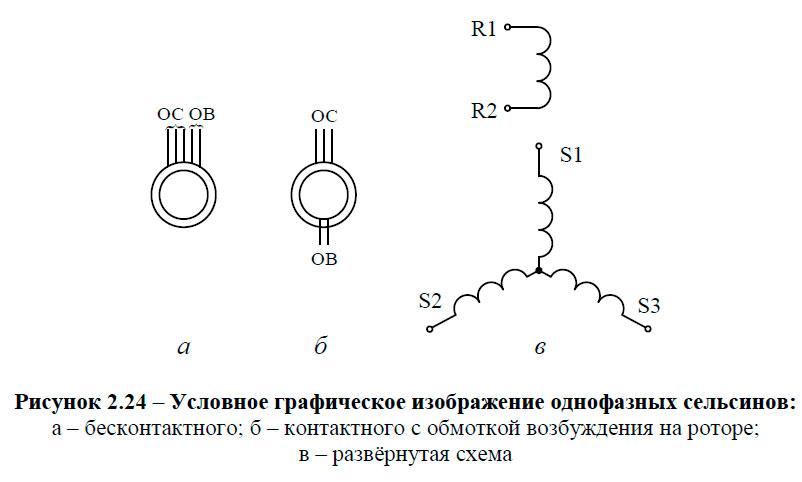
Графическое изображение и буквенное обозначение сельсина показано на рис. 2.24. Выводы синхронизирующей обмотки обозначены буквами S1, S2, S3, выводы обмотки возбуждения – буквами R1, R2. Сельсины обозначаются буквами: BE – приемник, BC – преобразователь.
Сельсины делятся на две группы: трехфазные и однофазные.
Трехфазные шины используются в системах, где требуется обеспечить однофазное и синхронное вращение двух двигателей (валов), расположенных на определенном расстоянии друг от друга. Трехфазный шинопровод имеет трехфазную обмотку возбуждения и трехфазную обмотку синхронизации. Эти двигатели конструктивно не отличаются от обычных асинхронных двигателей и в основном используются в приложениях высокой мощности.
Однофазный синхронизатор состоит из однофазной обмотки возбуждения (ОВ), трехфазной синхронизирующей обмотки (ТС), магнитопровода, вала и конструктивных элементов. Сельсины бывают бесконтактными или контактными. В первом случае обе обмотки расположены на статоре, во втором – одна обмотка расположена на статоре, а другая – на роторе. Синхронизирующая обмотка пазовая, обмотка возбуждения либо сосредоточена в катушке на полюсах, либо пазовая. В контактном синхронизаторе электрическое соединение с обмоткой на роторе осуществляется с помощью контактных колец и щеток. Принцип синхронизации не зависит от расположения каждой обмотки: на статоре или на роторе. Однако наиболее распространены те, в которых обмотка возбуждения расположена на роторе, а синхронизирующая обмотка – на статоре (рис. 1, б). Они имеют меньшее количество контактных колец и щеток, что обеспечивает более высокую надежность, меньший момент трения и меньший объем синхронизатора. В сигнальном тракте (провод, соединяющий синхронизирующие обмотки) нет скользящих контактов. При такой конструкции легче сделать демпфирующую обмотку на роторе.
Наличие скользящих контактов значительно снижает надежность контактных синхронизаторов. Бесконтактные синхронизаторы подразделяются на:
- (a) с однополярным возбуждением ротора со стороны статора;
- b) с переходным кольцевым трансформатором.
Недостатком бесконтактных синхронизаторов является неполноценное использование активных материалов. Они весят примерно в 1,5 раза больше, чем контактные. Причиной этого являются большие воздушные зазоры, которые вызывают большие токи утечки и высокие токи намагничивания.
- простота
- надежность;
- простота обслуживания.
- низкая точность синхронизации, особенно когда на синхронизирующий вал приемника действует значительный механический момент;
- относительно низкая точность передачи угла из-за неточности синфазного магнитопровода;
- колебания ротора при ненагруженном моменте синхронизатора на частоте питающего переменного тока.
Для повышения точности используется пара двигателей – “грубый” и “тонкий” (последний устанавливается через редуктор и делает несколько оборотов за оборот главного вала). Если сигнал от грубого синхронизатора слабее определенного порога, автоматика передает сигнал от точного синхронизатора на линию связи. Механические демпферы используются для подавления колебаний ротора без момента нагрузки.
Однофазные синхрокоптеры могут работать в двух режимах: индикаторном и трансформаторном.
Сельсинкро датчика принудительно поворачивается на определенный угол, а сельсинкро приемника приводится в нужное положение (рис. 2.25). Индикаторная схема используется для синхронной дистанционной передачи угла поворота и различных значений, предварительно преобразованных в угловое перемещение, когда на выходе нет значительного крутящего момента.
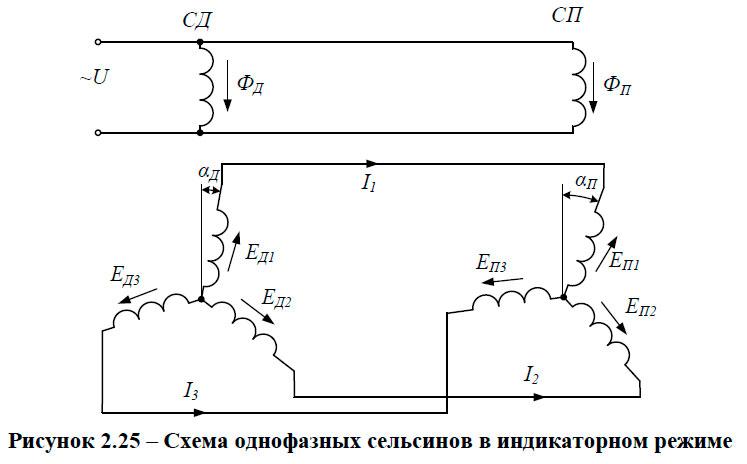
Если ротор сельсинного датчика выведен из согласованного положения и заблокирован (заторможен), то угол перекоса Δα = αД – αП будет отличаться от нуля. В этом случае в синхронизирующей и соединительной обмотках будут протекать токи смещения Iiкак ΔEi ≠0.
где ZФ – сопротивление фазной обмотки синхронной машины.
При взаимодействии магнитных потоков, создаваемых токами выравнивания, с потоком возбуждения FД и FП На валы роторов синхродатчика и синхроприемника подается синхронизирующий момент, заставляющий роторы поворачиваться в соответствующее положение. Поскольку ротор синхродатчика не заторможен, то под действием крутящего момента он выравнивается (синфазно) с ротором синхродатчика, т.е. занимает положение, при котором Δα=αД-αП=0.
Значение крутящего момента ротора синхродатчика является функцией угла перекоса:
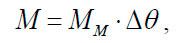
где ММ – максимальный крутящий момент синхронизатора, определяемый его параметрами.
Зависимость угла от крутящего момента является статической характеристикой синхронной муфты, работающей в индикаторном режиме.
В режиме индикатора угол передается со статической угловой погрешностью. В режиме холостого хода погрешность из-за собственного момента трения MТ является фундаментальной ошибкой и характеризует величину мертвой зоны приемника, в пределах которой ротор приемника может переместиться в любое положение при одном и том же положении энкодера.
Во время работы на точность передачи влияют колебания напряжения и частоты сети и сопротивление линии связи синхронных муфт. Уменьшение напряжения и увеличение частоты уменьшает поток возбуждения Ф. Увеличение расстояния между двигателями и сопротивления соединительной линии приводит к уменьшению величины тока синхронизирующей обмотки и MFD Fmax. В обоих случаях снижается синхронизирующий момент и точность коробки передач. Резкое снижение точности редуктора происходит, когда на валу приемника появляется момент нагрузки.
Датчик синхронизации принудительно поворачивается на определенный угол, и на выходе приемника синхронизации генерируется напряжение, которое является функцией угла рассогласования между ними (Рисунок 2.26). Трансформаторная схема синхронной передачи угла используется, когда ведомая ось имеет значительный момент сопротивления.
Обмотка возбуждения синхродатчика подключается к сети, как и в режиме индикации, и используется для создания пульсирующего магнитного потока в магнитной системе машины. Синхронизирующие обмотки энкодера и приемника соединены между собой соединительным проводом. Обмотка синхроприемника предназначена для создания сигнала (напряжения), зависящего от угла рассогласования. В исходном положении ротора SR ось обмотки 1 совпадает с осью обмотки возбуждения OV, в которой индуцируется максимальная ЭДС. При вращении ротора BF обмотки 1, 2 и 3 смещаются. Эти токи создают магнитный поток в сельсин-приемнике под углом Δα=αД-αП к продольной оси выходной однофазной обмотки. В выходной обмотке наводится ЭДС, которая является выходным сигналом синхронной пары:
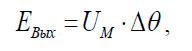
Где Uм – максимальное значение напряжения, индуцированного в ОВ.
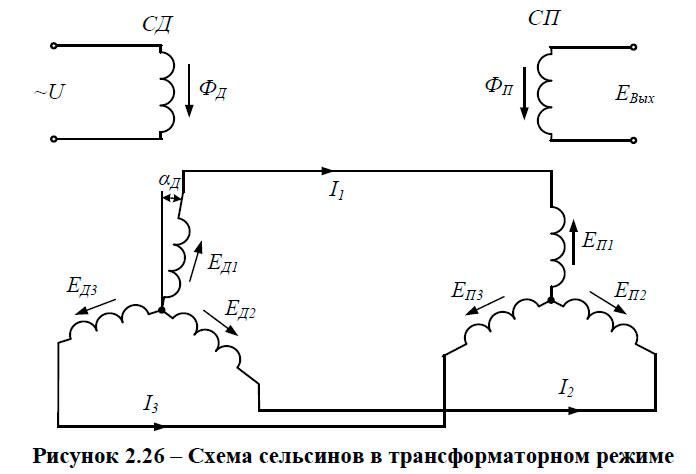
Затем сигнал усиливается, что приводит в действие исполнительный механизм, который перемещает объект управления и одновременно уменьшает угол смещения между датчиком и синхроприемником.
То, что максимально допустимые погрешности сельсинов в трансформаторном режиме меньше, чем в индикаторном, объясняется тем, что точность сельсинов в трансформаторном режиме определяется только их магнитной и электрической симметрией, а не величиной паразитных моментов на валу.
Существуют электрические схемы для обоих режимов:
- сопряженные (датчик и приемник);
- множественный (датчик и несколько приемников);
- дифференциальный (два датчика и приемник).
Режим многократного срабатывания
Иногда угловое значение необходимо передать на расстояние более чем в одно место. Например, когда положение контроллера необходимо передать на главную панель управления, местные панели управления и т.д. В этом случае несколько синхроприемников подключаются к одному передатчику. Этот режим называется многократным приемом (Рисунок 2.27).
Пусть к датчику подключено n приемников одного типа. Момент синхронизации пропорционален MF Fmax , который в свою очередь пропорционален току обмотки синхронизации Imah. Поскольку приемники подключены к преобразователю параллельно, синхронизирующий момент приемника в n раз меньше, чем синхронизирующий момент преобразователя, поскольку
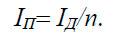
Из-за уменьшения момента сельсина приемника точность передачи будет значительно снижена.
Для сохранения синхронизирующего момента приемников необходимо выбрать синхродатчик, мощность которого в n раз больше мощности синхроприемников, т.е. сопротивление его синхронизирующей обмотки будет в n раз меньше сопротивления обмотки каждого синхроприемника.
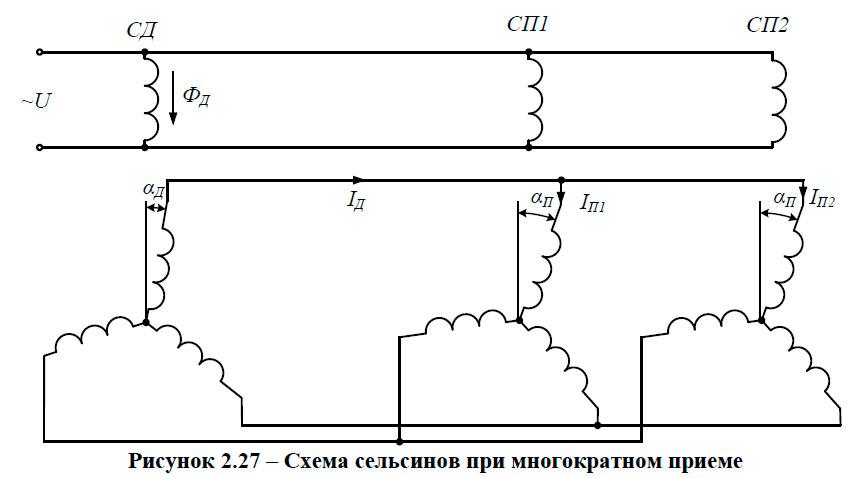
Дифференциальный режим переключения
В системах дистанционной передачи угла поворота дифференциальные синхронизаторы используются для воспроизведения угла поворота, равного сумме или разности углов, заданных двумя синхронизаторами датчиков. Дифференциальный синхронизатор имеет две трехфазные обмотки, одна из которых расположена в несиловых пазах статора, а другая – в несиловых пазах ротора. Обмотка ротора подключается к внешней сети через три контактных кольца и щетки. Рассмотрим принцип работы системы дистанционной индикации угла, состоящей из двух сельвиниевых датчиков СД1 и СД2 и одного дифференциального сельвиниевого приемника СП-СД (рис. 2). 2.28). Предположим, что ротор дифференциального синхронизатора заторможен. После включения в сеть переменного тока, пульсирующие магнитные потоки ФВ1 и FВ2. Поток FВ1 Дифференциальные обмотки синхронизации будут вызывать электродвижущие силы в обмотках фазы синхронизации датчика SD1, которые будут вызывать токи в цепи синхронизации этой цепи синхронизации. Эти токи, протекающие через обмотки синхронизации дифференциальной катушки, создают МЧМ FDC1. Когда ротор датчика SD1 поворачивается на угол αД1 по часовой стрелке вектор MF FDC1 повернута на тот же угол, но против часовой стрелки. Аналогичные процессы происходят в цепи синхронизации обмоток датчика СD2 и дифференциала Сельцина: при повороте ротора датчика СD2 на угол αД2 по часовой стрелке, вектор MF FDS2 роторной обмотки дифференциальной катушки также повернется на угол αД2но против часовой стрелки. В результате между векторами MF FDS1 и FDS2 дифференциального сельсина будет иметь пространственный угол, равный разности между углами, заданными датчиками KS1 и KS2.
В результате взаимодействия MF FDS1 и FDS2 к ротору дифференциального синхронизатора прикладывается крутящий момент MD. Таким образом, если ротор дифференциала SP-DC не заторможен, то под действием момента MD ротор повернется на угол β так, что векторы MF FDC1 и FDS2 совпадают по направлению и создают результирующий магнитный поток в магнитной системе дифференциального соленоида. Если роторы датчиков СД1 и СД2 повернуть на углы αД1 и αД2 в разных направлениях, ротор дифференциального соленоида будет воспроизводить угол поворота, равный разности заданных углов. Особенностью схем индикации с дифференциальным сельсином является то, что токи протекают в цепи синхронизации после того, как дифференциальный сельсин сделал заданные углы, т.е. в согласованном состоянии.
Литература из
Компоненты и функциональные устройства морской автоматики – Авдеев Б.А. [2018]
Каждый сельсин имеет статор и ротор, на которых размещены обмотки переменного тока. Существуют сельсины с одной обмоткой на статоре и тремя обмотками на роторе, и наоборот, с тремя обмотками на статоре и одной обмоткой на роторе, и, наконец, с тремя обмотками на статоре и такой же обмоткой на роторе.
Сельсины: назначение, строение, принцип действия
 Сельсины – это тип электрических машин переменного тока с выходной мощностью от нескольких ватт до нескольких сотен ватт (менее одного киловатта). Синхронизация используется для дистанционной передачи механического углового вращения с помощью электрических средств между устройствами, которые механически не соединены друг с другом.
Сельсины – это тип электрических машин переменного тока с выходной мощностью от нескольких ватт до нескольких сотен ватт (менее одного киловатта). Синхронизация используется для дистанционной передачи механического углового вращения с помощью электрических средств между устройствами, которые механически не соединены друг с другом.
Каждый синхронизатор имеет статор и ротор, на которых расположены обмотки переменного тока. Существуют синхронизаторы с одной обмоткой на статоре и тремя обмотками на роторе, и наоборот, с тремя обмотками на статоре и одной обмоткой на роторе, и, наконец, с тремя обмотками на статоре и тремя обмотками на роторе.
В зависимости от назначения в схемах автоматического управления синхронные муфты делятся на:
- Датчики Селсына,
- приемники селсинк
- разница.
Давайте посмотрим на рисунок 1, чтобы увидеть, как работает синхронная муфта.
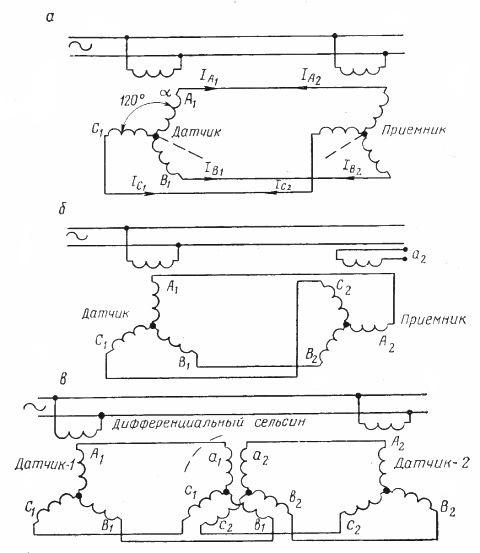
Рис. 1. Схемы сельсиновых муфт: а – по схеме датчик-приемник; б – сельсин-приемник в трансформаторном режиме; в – дифференциальная
Датчик-сельсин и сельсин-приемник подключены к одной сети переменного тока, их статорные обмотки имеют одну обмотку, а роторные обмотки с тремя катушками соединены между собой. Если теперь ротор датчика повернуть на любой угол, то ротор приемника будет повернут на тот же угол. Если ротор датчика вращается непрерывно с любой скоростью, ротор приемника будет вращаться с той же скоростью.
Работа сельсинхронной муфты основана на принципе электромагнитной индукции, который заключается в следующем. Переменный ток в обмотке статора с одной катушкой индуцирует токи в обмотке ротора с тремя катушками, величина которых зависит от взаимного расположения обмоток ротора и статора.
Если роторы двух сельсинов равноудалены от их статоров, то токи в проводниках, соединяющих роторы, равны и противоположны друг другу, так что ток в каждой катушке равен нулю. Следовательно, крутящий момент на валу одного и другого синхронизатора равен нулю.
Если ротор синхронизатора повернуть вручную или другим способом на определенный угол, то токи между роторами выйдут из равновесия, и на валу синхроприемника возникнет вращающий момент, так что его ротор будет вращаться до тех пор, пока токи не выйдут из равновесия, то есть пока этот ротор не примет то же положение, что и ротор синхронизатора.

В системах автоматического управления нередко синхроприемник работает в трансформаторном режиме (рис. 1, б). В этом случае ротор приемника неподвижен, а обмотка статора отключена от сети. Эта обмотка индуцирует ток на стороне ротора, а токи, протекающие через обмотки, являются результатом положения ротора сельсина. Это означает, что величина тока, например, на клеммах ротора приемника пропорциональна углу поворота датчика.
В исходном положении роторы смещены на 90°, и в этом случае индуцированная электродвижущая сила на роторе датчика равна нулю. Теперь, когда ротор датчика вращается, в роторе приемника индуцируется ток, пропорциональный углу рассогласования роторов.
epr = emax x sin θ
Дифференциальная синхронизация используется, когда необходимо контролировать разницу в углах поворота двух осей, т.е. их несоосность. В этом случае два датчика selsyn размещаются на двух валах, скорости которых сравниваются друг с другом. Трехкатушечные обмотки соединяют роторы этих сельсинов с трехкатушечными обмотками статора и ротора третьего дифференциального сельсина (рис. 1, в). Угол поворота ротора дифференциального синхронизатора равен разности углов поворота датчиков синхронизации.
Если вам понравилась эта статья, пожалуйста, поделитесь ею в социальных сетях. Это поможет нам развивать наш сайт!
В соответствии со своей структурой целсины подразделяются на контактные и бесконтактные. В системах синхронных передач они используются в качестве преобразователей и приемников. Сельсин – это асинхронная машина с однофазной первичной обмоткой и трехфазной вторичной обмоткой, используемой для синхронизации.
Связаться с Селсином
Что такое сельсин?
Синхронные системы передачи на основе однофазных электрических машин (сельсинов) широко используются для дистанционной передачи различных измерений и показаний, команд, а также для дистанционного и автоматического управления на судах.
Синхины, в зависимости от их конструкции, подразделяются на контактные и бесконтактные. Они используются как кодеры и приемники в синхронных системах передачи. Сельсин – это асинхронная машина с однофазной первичной обмоткой и трехфазной вторичной обмоткой, используемой для синхронизации.
Связаться с Селсыном
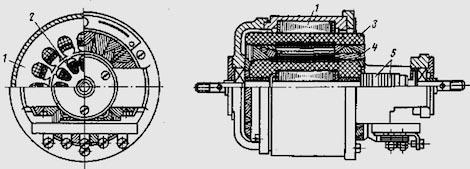
Контактные приводы Neptun типа DN-500 широко используются в качестве измерительных приборов. К такому синхронизатору можно одновременно подключить до 10 потребителей. Однофазная первичная обмотка (рис.1) расположена на однозначном роторе, а трехфазная вторичная обмотка – на статоре. Концы первичной обмотки соединены с выводами через два контактных кольца и медно-графитовые щетки, сидящие на пластмассовой крестовине.
Концы трехфазной обмотки подключаются непосредственно к клеммам. Стационарная обмотка расположена в пазах полюсов ротора для гашения колебаний ротора относительно синхронного положения. Эта обмотка состоит из двух отдельных короткозамкнутых витков, ось которых смещена на 90° относительно оси обмотки возбуждения.
Существенным недостатком ползунов с электрическим приводом является Существенным недостатком электромагнитной совместимости является скользящий контакт.Это значительно снижает их надежность, поэтому на современных судах в качестве приемников используются бесконтактные селекторы типа БС-500.
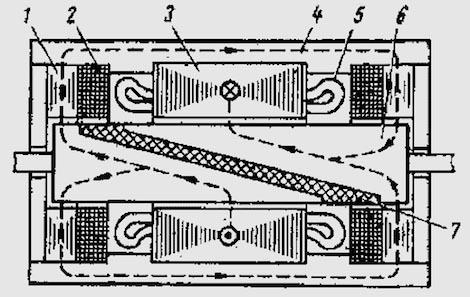
Бесконтактные синхронизаторы по принципу действия похожи на контактные синхронизаторы. Разница заключается в том, что бесконтактная синхронизация имеет однофазную первичную обмотку и трехфазную вторичную обмотку на статоре и специальную конструкцию на роторе.
Бесконтактный синхронизатор (рис. 2) имеет трехфазную вторичную обмотку в пазах статора. Ротор имеет барабанную форму с двумя отдельными полюсами P1 и P2, изготовленными из листового электротехнического металла. Центр ротора изготовлен из немагнитного материала. Однофазная первичная обмотка помещена на внешний постоянный магнитопровод из стального листа.
Магнитный поток Ф от первичной обмотки проходит через внешний магнитопровод, воздушный зазор δ2полюс P2 ротора, воздушный зазор δ1в точке А статора разделяется и проходит через две ветви в верхнюю половину статора в точку В, где соединяется и проходит через воздушный зазор 6i к полюсу Р1 ротора и далее через воздушный зазор δ1 возвращается во внешнюю магнитную цепь. Таким образом, первичная и вторичная обмотки находятся во взаимно перпендикулярных плоскостях. Поток первичной обмотки не проходит напрямую через вторичную обмотку, минуя ротор, поэтому эффективность вторичной обмотки зависит от положения ротора.
Сельсины могут работать в индикаторном, трансформаторном и дифференциальном режиме.
В режиме индикации первичные обмотки датчика и нагрузки подключены к сети, а вторичные обмотки подключены напротив друг друга. Когда ротор датчика поворачивается на определенный угол, компенсационные токи заставляют ротор приемника поворачиваться на точно такой же угол.
При работе трансформатора ротор приемника тормозится, а первичная обмотка, отключенная от сети, используется в качестве вторичной обмотки трансформатора. Размер и фаза этой обмотки зависят от угла и направления вращения ротора датчика,
В дифференциальном режиме В качестве потребителя используется система синхронизации с трехфазной первичной и вторичной обмоткой. Обе обмотки подключены к трехфазным вторичным обмоткам обоих датчиков. Угол поворота приемника определяется суммой или разностью углов поворота датчиков.
Читайте далее:- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Асинхронный электродвигатель – конструкция, принцип работы, типы асинхронных двигателей.
- Векторное управление вентильным двигателем в безредукторном сервоприводе – темы научных работ по электротехнике, электронике, информатике читайте бесплатно тексты научных работ в электронной библиотеке КиберЛенинка.
- Принцип работы синхронного двигателя.
- Как найти начало и конец обмотки электродвигателя – ООО "СЗЭМО Электродвигатель".