Не без недостатков. Умформеры имеют подвижные части, что означает, что срок их службы ограничен. Масса, вес, богатство материалов и, следовательно, высокая стоимость. Шумная работа, вибрация. Частая смазка подшипников, очистка коллекторов, замена щеток. Эффективность ограничена на 70%.
Способы повышения частоты тока
В настоящее время наиболее популярным методом повышения (или понижения) частоты тока является применение преобразователя частоты. Частотные преобразователи используются для преобразования однофазного или трехфазного переменного тока промышленной частоты (50 или 60 Гц) в частоту, необходимую, например, от 1 до 800 Гц, для питания однофазных или трехфазных двигателей.
Помимо электронных преобразователей частоты, для повышения частоты тока используются также индукционные преобразователи частоты, в которых, например, асинхронный двигатель с фазнозамкнутым ротором частично работает в режиме генератора. Существуют также омиформаторы – мотор-генераторы, которые также будут рассмотрены в этой статье.

Электронные преобразователи частоты
Электронные преобразователи частоты обеспечивают плавное регулирование скорости синхронных и асинхронных двигателей путем плавного повышения частоты на выходе преобразователя до фиксированного значения. Самый простой подход достигается путем задания фиксированной характеристики U/f, в то время как более продвинутые решения используют векторное управление.
Частотные преобразователи обычно содержат выпрямитель, который преобразует переменный ток промышленной частоты в постоянный, за выпрямителем находится инвертор, в простейшей форме – на основе ШИМ, который преобразует постоянное напряжение в переменный ток нагрузки, причем частота и амплитуда задаются пользователем, эти параметры могут изменяться в большую или меньшую сторону от параметров входной сети.
Выходной блок электронного инвертора обычно представляет собой тиристорный или транзисторный мост, состоящий из четырех или шести ключей, которые создают необходимый ток для питания нагрузки, в частности, электродвигателя. Чтобы сгладить шумы в выходном напряжении, на выходе добавляется фильтр ЭМС.
Как упоминалось выше, в электронном инверторе в качестве ключей используются тиристоры или транзисторы. Для управления клавишами используется микропроцессорный модуль, выполняющий функции контроллера, а также ряд диагностических и защитных функций.
Однако преобразователи частоты делятся на два класса: с прямой связью и с непосредственной связью. При выборе между этими двумя классами взвешиваются преимущества и недостатки обоих, и определяется пригодность того или иного для решения конкретной задачи.
Прямая связь
Инверторы с прямой связью характеризуются тем, что в них используется управляемый выпрямитель, в котором группа тиристоров, открывающихся попеременно, коммутирует нагрузку, например, обмотку двигателя, непосредственно с сетью.
В результате на выходе получается срез синусоиды сетевого напряжения, а эквивалентная выходная частота (для двигателя) меньше частоты сети, в пределах 60% от этой частоты, т.е. от 0 до 36 Гц для входного сигнала 60 Гц.
Эти характеристики не позволяют сильно варьировать производительность устройств в промышленности, поэтому спрос на такие решения невелик. Кроме того, тиристорами сложно управлять, стоимость схемы выше, на выходе высокий уровень шума, требуются компенсаторы, в результате габариты высокие, а эффективность низкая.
С подключением постоянного тока
Гораздо лучше в этом отношении инверторы звена постоянного тока, в которых переменный ток из сети сначала выпрямляется, фильтруется, а затем преобразуется обратно в переменный ток нужной частоты и амплитуды с помощью схемы с электронными переключателями. Здесь частота может быть гораздо выше. Конечно, двойное преобразование несколько снижает эффективность, но параметры выходной частоты как раз соответствуют требованиям потребителей.
Для получения чистой синусоидальной волны на обмотках двигателя используется схема инвертора, в которой напряжение нужной формы получается с помощью широтно-импульсной модуляции (ШИМ). В качестве электронных переключателей используются либо тиристоры с блокировкой, либо IGBT.
Тиристоры могут выдерживать более высокие импульсные токи, чем транзисторы, поэтому тиристоры все чаще используются в инверторах с прямой связью и со звеном постоянного тока, достигая КПД до 98%.
Справедливости ради следует отметить, что электронные инверторы являются нелинейной нагрузкой на сеть и генерируют в ней высшие гармоники, что ухудшает качество электроэнергии.
Для преобразования электроэнергии из одной формы в другую, в частности, для повышения частоты тока без применения электронных решений, используются так называемые умформеры – мотор-генераторы. Такие машины работают аналогично проводнику электричества, но на самом деле здесь нет прямого преобразования электрической энергии, как в случае с трансформатором или электронным преобразователем частоты.
Здесь имеются следующие возможности:
Постоянный ток может быть преобразован в переменный ток с более высоким напряжением и частотой;
Постоянный ток может быть получен из переменного тока;
Прямое механическое преобразование частоты с увеличением или уменьшением частоты;
Трехфазный ток нужной частоты может быть получен из однофазного тока с частотой сети.
В своей канонической форме мотор-генератор представляет собой электродвигатель, вал которого напрямую соединен с генератором. Выход генератора оснащен стабилизирующим устройством для улучшения частотных и амплитудных характеристик вырабатываемой электроэнергии.

В некоторых вариантах якорь содержит обмотки двигателя и генератора, гальванически развязанные, с выводами, подключенными к коллектору и выходным движкам соответственно.
Другие варианты имеют общие обмотки для обоих токов, например, для преобразования числа фаз нет токосъемного коллектора, а просто выводы для каждой выходной фазы из обмотки статора. Таким образом, асинхронная машина преобразует однофазный ток в трехфазный (идентично увеличению частоты).
Таким образом, мотор-генератор позволяет преобразовывать тип тока, напряжение, частоту, количество фаз. До 1970-х годов инверторы этого типа использовались в вооруженных силах СССР, где они питали, в частности, ламповое оборудование. На однофазные и трехфазные преобразователи подавалось 27 В постоянного тока, а на выходе получалось 127 В 50 Гц однофазного переменного тока или 36 В 400 Гц трехфазного переменного тока.
Мощность этих зонтов достигала 4,5 кВА. Подобные машины использовались в электровозах, где постоянное напряжение 50 В преобразовывалось в переменное напряжение 220 В при частоте 425 герц для питания люминесцентных ламп и переменное напряжение 127 В при частоте 50 герц для питания бритв пассажиров. В первых компьютерах для питания часто использовались умформеры.
Даже сегодня умформеры можно встретить в некоторых местах: в троллейбусах, трамваях, электропоездах, где они были установлены для подачи низкого напряжения для цепей управления. Однако в настоящее время они почти полностью заменены твердотельными решениями (тиристорами и транзисторами).
Мотор-генераторные преобразователи имеют много преимуществ. Во-первых, это надежная гальваническая развязка выходных и входных цепей. Во-вторых, на выходе получается чистая синусоидальная волна без шумов. Устройство имеет очень простую конструкцию, поэтому его обслуживание довольно простое.
Это простой способ получения трехфазного напряжения. Инерция ротора смягчает пусковые токи, возникающие при резких изменениях параметров нагрузки. И, конечно, очень легко регенерировать электроэнергию.
Есть и некоторые недостатки. Умформеры имеют движущиеся части и, следовательно, срок их службы ограничен. Масса, вес, богатство материалов и, следовательно, высокая стоимость. Шумная работа, вибрации. Частая смазка подшипников, очистка коллекторов, замена щеток. Эффективность ограничена 70%.
Несмотря на эти недостатки, механические мотор-генераторы по-прежнему используются в энергетике для выработки большого количества энергии. В будущем двигатели-генераторы могут способствовать гармонизации сетей с частотами 60 Гц и 50 Гц или снабжению сетей с повышенными требованиями к качеству электроэнергии. Обмотки ротора машины в этом случае могут питаться от маломощного полупроводникового инвертора.
Если вам понравилась эта статья, пожалуйста, поделитесь ею в социальных сетях. Это поможет развитию нашего сайта!
–>
Проектирование на уровне системы
- Предыдущий пост
–>
Вопросы проектирования на уровне системы
Применение MATLAB, Simulink, CoCentric, SPW, SystemC ESL, SoC
Модераторы Rst7 
 Среда 16:35
Среда 16:35- Тема:Передача спектра в Matlab
- От:FatRobot
–>
Математика и физика
Раздел модераторов Rst7
- Вчера в 08:47
- Тема:Невозможно решить систему дифуров
- От:SSerge
–>
Операционные системы
Linux, Win, DOS, QNX, uCOS, eCOS, RTEMS и др.
Модераторы раздела Rst7
- Программирование
- Linux
- uC/OS-II
- scmRTOS
- FreeRTOS
- Android
- 8 часов назад
- Тема:Автозапуск приложения Python под Armbian на Oran…
- От:BaN
–>
Документация
Документация и сопутствующие материалы
Модераторы раздела Rst7
- 24 октября.
- Тема:Уровень качества приема
- От:Елена111
–>
CAD/CAM/CAE/PLM системы
Обсуждение AutoCAD, Компас, SolidWorks и т.д.
- Среда, 10:34 утра.
- Тема:Российские BIM-технологии: проектирование систем…
- От:Паола Шар
–>
Проектирование цифровых, аналоговых и аналого-цифровых интегральных схем
Модераторы раздела Rst7
- 21 час назад
- Тема:Прототип набора для фотолитографии из кана…
- От:бауманец
–>
Электробезопасность и электромагнитная совместимость
Обсуждение вопросов электробезопасности и целостности сигнала
Модерируется Rst7
- EMC
- Электробезопасность
- 18 октября
- Тема:Спектральный анализатор для чайника
- От:DSIoffe
–>
Управление проектами
Управление жизненным циклом проекта, системы контроля версий и т.д.
Модераторы раздела Rst7
- 23 сентября
- Тема:Планирование объемов работ, планирование сети…
- От:Dist
–>
Нейронные сети и машинное обучение (NN/ML)
Дискуссионный форум по машинному обучению и нейронным сетям
Модерируется Rst7
- 12 августа.
- Тема:Нейросетевой язык письма
- От:count_enable
Вторая разновидность электромашинных преобразователей – это преобразователи постоянного тока с прямой связью и асинхронные преобразователи частоты.
Изменение частоты тока источника
Регулирование скорости трехфазных асинхронных двигателей путем изменения частоты питания становится все более популярным в роликовых конвейерах, конвейерных системах и особенно в высокоскоростных станках (свыше 20 000 мин-1 ).
В случае регулирования частоты также необходимо регулировать напряжение питания, поскольку
![]()
Из выражения (3.35) следует, что если при постоянном напряжении увеличить частоту, то магнитный поток уменьшится и, следовательно, уменьшится допустимый крутящий момент.
При уменьшении частоты магнитный поток увеличивается (при = const), что приводит к насыщению стали машины и, как следствие, к резкому увеличению намагничивающих токов и на гистерезисе, следовательно, к нагреву двигателя. Поэтому, чтобы наилучшим образом использовать асинхронный двигатель для регулирования скорости путем изменения частоты, необходимо одновременно регулировать частоту и напряжение, что возможно только в замкнутых системах привода:
![]()
Не существует простых и дешевых преобразователей, удовлетворяющих требованиям выражения (3.36). Преобразователи частоты, используемые сегодня, можно разделить на:
- 1) электромеханические преобразователи;
- 2) Преобразователи затворного или статического типа.
Электромеханические преобразователи частоты преобразуют переменный ток в постоянный и затем производят переменный ток другой частоты либо с помощью синхронного генератора, либо с помощью прямой связи. Прямые преобразователи постоянного тока не нашли широкого применения из-за их высокой стоимости.
Преобразователь частоты с косвенной схемой с использованием синхронного генератора показан на рисунке 3.14. 3.14. В этой схеме:
- – Mj, Gx — асинхронный двигатель и генератор постоянного тока для преобразования переменного сетевого напряжения фиксированной частоты в регулируемое постоянное напряжение, которое зависит от тока возбуждения генератора Gt;
- – М2 – Двигатель постоянного тока, способный изменять свою скорость в зависимости от приложенного к нему напряжения;
- – С2 – Синхронный генератор переменного тока. При изменении его угловой скорости пропорционально изменяются частота и напряжение;
М3, М4, М5 – Асинхронные двигатели (потребители).
Вторая разновидность электромеханических преобразователей – это преобразователи постоянного тока с прямой связью и асинхронные преобразователи частоты.
Основным недостатком электромеханических инверторов является высокое энергопотребление. Если мы предположим, что мощность, потребляемая двигателями M3, М4, М5, равна Рп потребителей, то, без учета потерь в машинах, общая установленная мощность преобразователя частоты составит
![]()
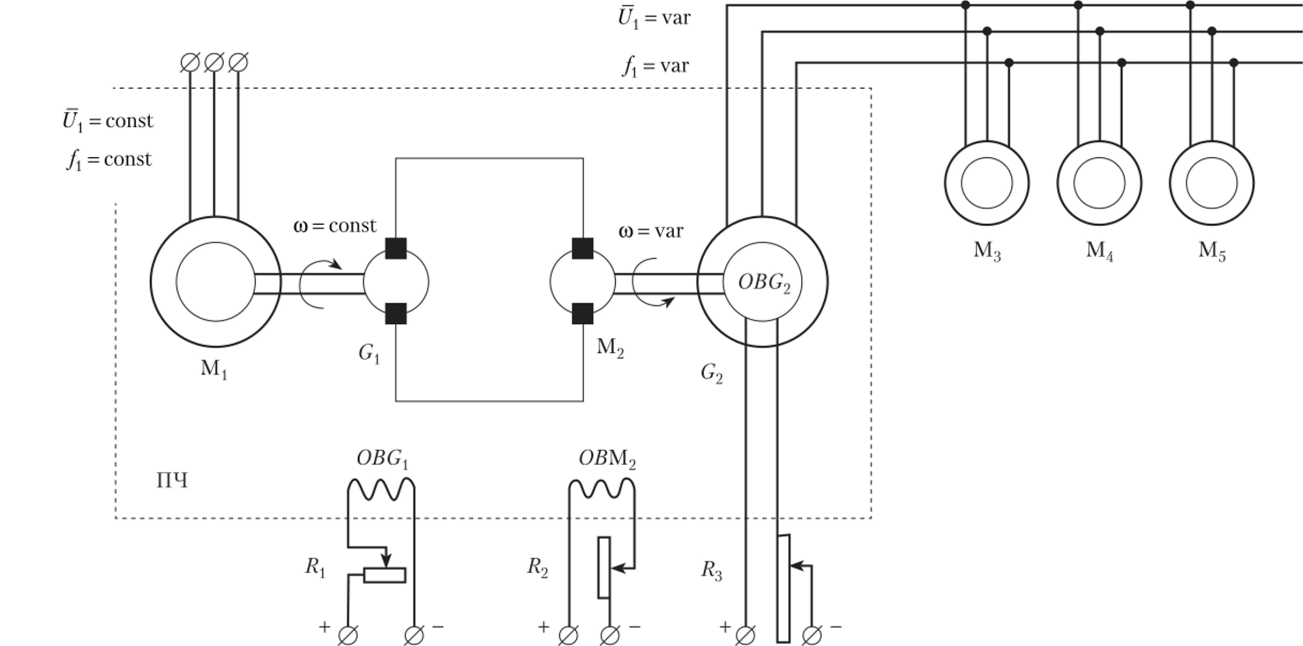
Рисунок 3.14. Машинный преобразователь частоты с промежуточным контуром
и синхронный генератор переменного тока
Учитывая потери в машинах инвертора, его установленная мощность будет еще выше.
КПД электромагнитных преобразователей невысок, поскольку он определяется произведением КПД отдельных машин. Если эффективность отдельных машин составляет 0,9, то общая эффективность равна 0,94 = 0,66.
Электромагнитные преобразователи по своей сути являются инерционными.
Вышеперечисленные недостатки электромеханических преобразователей привели к необходимости разработки статических преобразователей на основе тиристоров или транзисторов.
Статические преобразователи можно разделить на два типа в зависимости от их конструкции:
- (a) с прямым соединением;
- b) со звеном постоянного тока.
Преобразователи с прямым соединением (Рисунок 3.15) предназначены для преобразования высоких частот в низкие.

Рисунок 3.15. Статический (тиристорный) преобразователь частоты (THF) с прямым соединением
Преимущества инверторы с прямой связью:
- – Однократное преобразование частоты и, следовательно, высокий КПД (0,97-0,98);
- – Жесткость характеристик;
- – Возможность регулировки амплитуды выходного напряжения независимо от частоты;
- – плавность регулирования.
- – Ограниченное регулирование выходной частоты (до 40% от частоты сети);
- – Регулирование частоты только в нисходящем направлении.
Наиболее распространенными областями применения в электроприводах являются инвертор
Инверторы звена постоянного тока (рис. 3.16).
Преимущества преобразователи частоты с преобразователями постоянного тока:
- – Может как повышать, так и понижать частоту (/1>YX= 5-I000 Гц);
- – Высокая эффективность (до 0,96) и coscp > 0,85;
- – быстрая работа, низкая инерционность;
- – малый размер, тихая работа, надежность;
- – бесступенчатое регулирование.
Главная недостаток Основным недостатком инвертора промежуточного элемента постоянного тока является высокая цена регулирующего устройства.
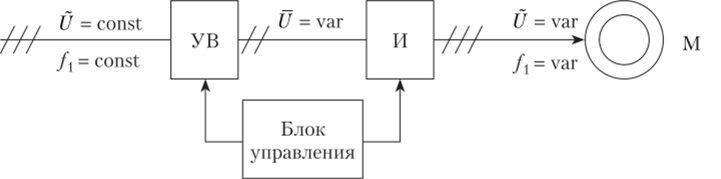
Рис. 3.16. Принципиальная схема преобразователя частоты с косвенным элементом постоянного тока:
C – управляемый выпрямитель; I – инвертор, преобразующий постоянный ток в переменный ток контролируемой частоты и амплитуды
На данный момент у нас уже есть универсальная таблица задержек, теперь нам нужно преобразовать ее специально для микроконтроллера.
Как регулировать электропитание переменного тока
Я решил построить для своего загородного дома устройство, в котором, как утверждалось, можно было бы варить сыр. Устройство выглядело мощным и представляло собой железный ящик, подозрительно напоминающий старую стиральную машину. Внутри коробки (все еще в хорошем состоянии!) находились три нагревателя, каждый мощностью 1700 Вт. В целом, сыра должно быть достаточно для небольшой деревни.
Продукт (похожий на что-то из “Безумного Макса”) должен был быть очень высокотехнологичным и поддерживать заданную температуру как можно меньше. Для этого рядом находилась еще одна коробка с симисторами, к которым были подключены нагреватели, и схема, которая давала высокий уровень, когда синусоида превышала ноль. И у меня есть интересный проект.
Итак, нам нужно достичь и поддерживать заданную температуру, и алгоритм PID должен быть способен это сделать. Я не буду вдаваться в подробности того, как он работает, но скажу, что он получает на вход текущую ошибку и выводит некоторое число в определенных пределах. В моем случае это будет мощность, отдаваемая нагревателю, хотя в принципе это может быть любой инерционный процесс, напр. обороты двигателя. Для ПИД-регулятора важно, чтобы выходная величина была линейной. Поэтому давайте попробуем разобраться, как регулируется мощность и насколько она линейна.
Как регулируется власть в целом?
Мощность – это произведение силы тока и напряжения. Если проиллюстрировать это графически, то для постоянного тока это будет площадь прямоугольника со сторонами, равными напряжению и силе тока.
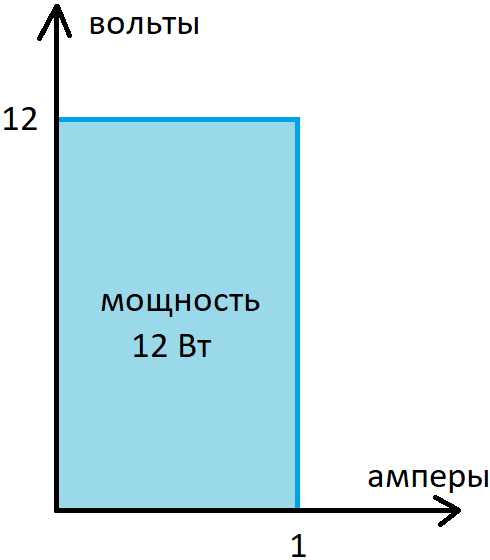
Поскольку при постоянных сопротивлении и напряжении ток также будет постоянным, заменим ось тока осью времени. Я принимаю сопротивление за постоянное, чтобы объяснить принцип регулирования.
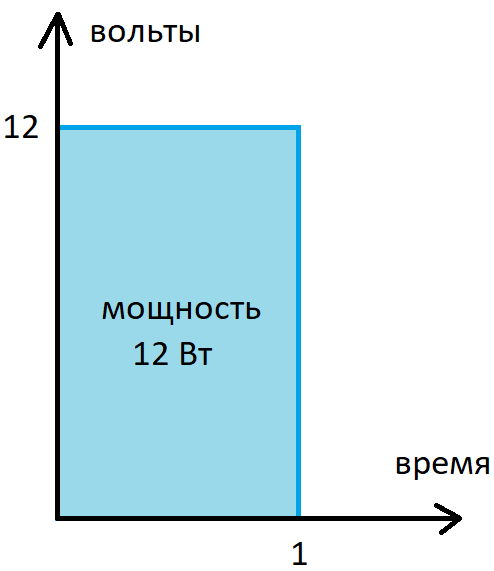
Тогда для заданного напряжения (12 В) и сопротивления 12 Ом, согласно закону Ома: I=U/R, мы получим ток 1 А, следовательно, мощность в единицу времени составит 12 Вт. При другом сопротивлении мощность, конечно, тоже меняется.
Теперь, если мы хотим регулировать мощность в единицу времени, мы должны каким-то образом изменить площадь фигуры в единицу времени. Самым чистым способом было бы просто изменить напряжение, тогда мощность также изменится пропорционально. Но драйвер, как и любое цифровое устройство, не умеет плавно менять напряжение на ножках, он может либо “поднять” его до высокого уровня, либо “опустить” до низкого. Этот недостаток компенсируется скоростью, даже самый привередливый современный МК может работать со скоростью миллионы тактов в секунду. Чтобы отрегулировать мощность, контроллер будет очень быстро “шевелить” ногой, тем самым изменяя результирующую площадь импульса в единицу времени.
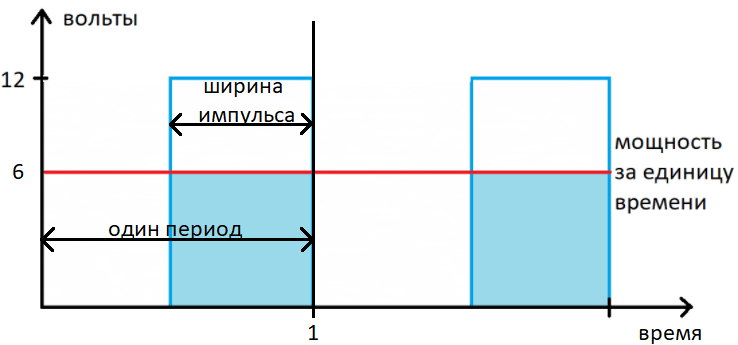
Широтно-импульсная модуляция (ШИМ) основана на этом принципе. Изменяя время (ширину) импульса за период, мы изменяем выходную мощность. На рисунке выше показаны два периода ШИМ. Каждый период имеет отношение площади импульса к общей площади периода 0,5, т.е. в течение половины периода контроллер выдает высокий сигнал, а в течение другой половины – низкий. Отношение длительности высокого сигнала к длительности низкого сигнала называется рабочим циклом. Красная линия на графике представляет собой результирующую мощность в единицу времени и показывает, что при коэффициенте нагрузки 0,5 мощность также уменьшилась вдвое (с 12 Вт до 6 Вт). Хорошей новостью является то, что ШИМ в контроллерах реализован аппаратно. Чтобы настроить что-то, достаточно запустить его и изменить рабочий цикл по мере необходимости.
Для постоянного тока оптимальным является режим ШИМ, и чем больше инерционных устройств вы к нему подключите, тем меньшую частоту ШИМ вы сможете использовать. Для большого THF достаточно одного герца, но для светодиодов лучше использовать более высокую частоту. Кстати, частота ШИМ в подсветке экрана ноутбука часто является чуть ли не решающим фактором при покупке, потому что если частота слишком низкая, глаза будут быстро уставать.
Если мы попробуем трюк с выделением ШИМ для переменного напряжения, мы увидим, что все нарушено, и мощность больше не регулируется линейно
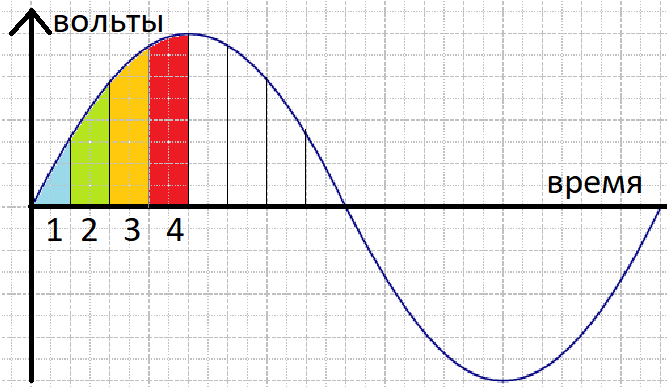
в то же время интервалы стали давать нам разную площадь и, следовательно, разную мощность. Однако если разделить получившиеся слоты на еще более мелкие, то процентное соотношение ширины импульса к ширине среза выравнивается.
Если мы возьмем равный процент выходной мощности от каждого среза, мы получим тот же процент мощности всей формы волны, и на выходе мы получим линейный регулятор мощности переменного тока. И чем выше частота ШИМ, тем больше срезов обнуляет синусоидальную волну, поэтому мы получаем большую линейность.
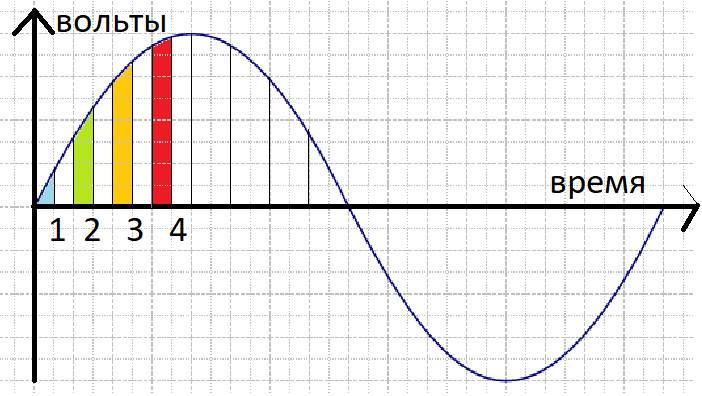
Это было бы решением всех проблем, но в моем случае устройством, коммутирующим нагрузку, был не быстрый транзистор, а симистор – медленное устройство, с максимальной частотой в несколько сотен герц, к тому же симистор может быть только открытым, он закрывается сам после превышения нуля. На таких частотах невозможно линейно управлять переменным напряжением 50 Гц. Для этого в дополнение к симисторам устанавливается нейтральная цепь.
При использовании симисторов лучше разделить синусоиду на части равной площади и записать время каждой такой части в таблицу. Затем каждое последующее значение из таблицы будет линейно увеличивать мощность.
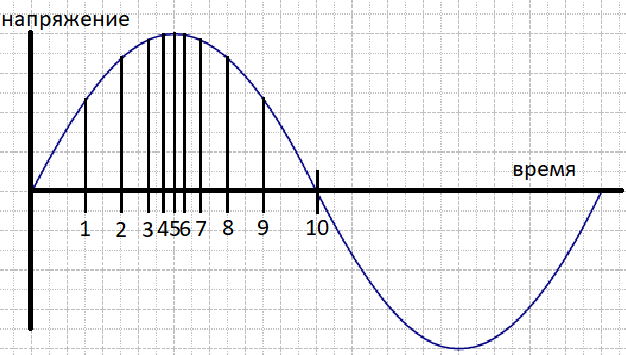
На приведенной выше схеме полуволновая синусоидальная волна разделена на фрагменты разной длительности, но одинаковой площади и, следовательно, несущие одинаковую мощность. Все, что нам нужно сделать, это загрузить таблицу временных интервалов в наш контроллер, синхронизировать один из его таймеров с частотой синусоиды, использовать для этого схему сброса и просто извлечь из таблицы нужное значение, во время которого возникнет высокий уровень. Суть метода аналогична ШИМ, но несколько изменена и синхронизирована с источником переменного напряжения.
Расчет таблицы мощности
Теперь мы можем перейти непосредственно к расчетам.
Первоначально задача состоит в том, чтобы разделить синусоидальную волну на произвольное количество срезов, каждый из которых имеет одинаковую площадь. В этот момент мы обычно обливаемся холодным потом, потому что площадь под графиком – это геометрическое определение интеграла. Следовательно, нам нужно будет взять интеграл от функции и определить пределы интегрирования, которые дадут тот же результат. Затем (как будто вычисления интегралов было недостаточно!) полученные предельные значения следует преобразовать во время задержки (время, в течение которого будет поддерживаться высокий уровень). Затем полученное время необходимо преобразовать в понятное контроллеру число – количество тиков таймера. Это звучит страшно, но на самом деле давайте разберемся с этим сейчас:
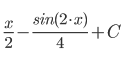
Во-первых, сама функция – как написано выше, мощность является произведением тока на напряжение, для переменного тока (без сдвига фаз) это утверждение также верно, но поскольку и ток, и напряжение меняются со временем, P=IU превращается в P=I*sin(t) * U*sin(t). Поскольку амплитуда синусоиды для нас малозначима, уравнение вырождается в P=sin^2(t).
Неопределенный интеграл квадратного синуса
Теперь нам нужно найти пределы определенных интегралов. Давайте выберем, на сколько частей мы хотим разбить нашу синусоиду: я выбрал сто, чтобы мы могли регулировать мощность с шагом в 1%.
Итак, мы нашли, каким будет неопределенный интеграл, и даже уже выбрали шаг. Теперь нам нужно найти пределы интегрирования. Смысл их выбора заключается в том, что значение определенного интеграла должно быть постоянным, когда мы их меняем. Напомним, что определенный интеграл – это формула, а дифференцируемый интеграл – это число. Определенный интеграл вычисляется по формуле:
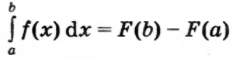
То есть мы берем неопределенный интеграл, подставляем в него верхнее число, затем нижнее, и вычитаем второе из первого.
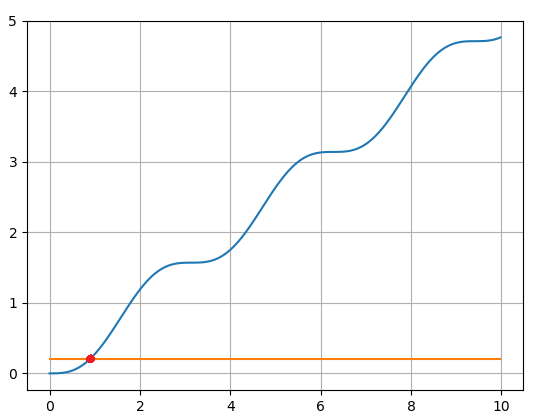
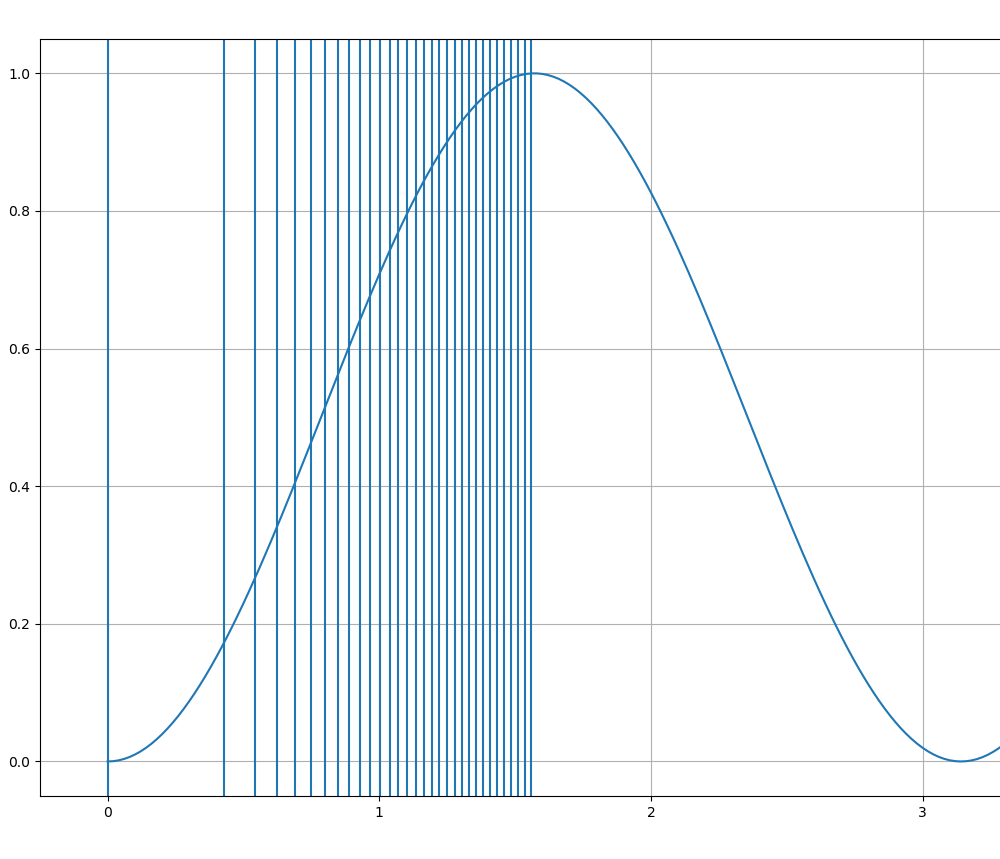
Наш неопределенный интеграл является смешанной тригонометрической функцией, что означает, что он не имеет общего аналитического решения. Такие функции обычно решаются численными или графическими методами. Графический метод предполагает построение левой и правой сторон уравнения, пересечение которых решит уравнение. На рисунке показано решение уравнения для 0,2
Помимо графического метода, мы также можем использовать численный метод, который заключается в нахождении решения. Мы будем подставлять числа в неопределенный интеграл до тех пор, пока не найдем решение). Вы можете использовать лист бумаги и карту для выполнения математических вычислений, можете использовать онлайн-калькулятор, я буду использовать Python и библиотеку numpy:
Что ж, у нас есть массив чисел (пределы интегрирования!), мы можем проверить правильность этих чисел, подставив их в интеграл. В результате должна получиться площадь, равная выбранной степени! Теперь, если вы подставите эти цифры в диаграмму мощности, у вас должна получиться следующая картина:
Если все прошло успешно, можно двигаться дальше и установить полученные числа в измерение времени, так как теперь они в радианах. Для этого необходимо найти угловую скорость для частоты сетки, т.е. количество радианов в секунду.
Затем узнайте, сколько времени занимает один радиан
Теперь переведите значения задержки в радианах во время, умножив каждое значение на период в радианах (T). Давайте проверим наши мысли: действительно ли мы получим время задержки, если умножим задержку на период? Задержка измеряется в радианах, период в секундах на радиан, мы хотим их перемножить. Тогда rad * ( sec / rad ) = sec. У нас есть время, поэтому рассуждения должны быть правильными.
Опять же, для расчетов я предпочитаю python:
На данный момент у нас уже есть универсальная таблица задержек, теперь нам нужно преобразовать ее специально для микроконтроллера.
Расчет таймера MC и перевод таблицы
Время необходимо преобразовать в количество переполнений таймера, понятное микроконтроллеру. Чем выше частота, тем точнее таймер будет определять время, но, с другой стороны, тем меньше времени останется для остальной части программы. Именно здесь необходимо найти золотую середину.
Чтобы определить минимально допустимую частоту для таймера, нужно найти числа в массиве с минимальной разницей между ними. Чем меньше разница, тем ближе мы к максимуму синуса. Затем возьмите задержку, при которой синус достигает сингулярности, и число перед ним, и найдите их разность:
5 мс – 4,9363 мс = 0,0636 мс.
Полученное число является максимально допустимым периодом между прерываниями таймера, а затем через него находим минимально допустимую частоту
1 / 0,0636 = 15 КГц
Таким образом, для заданной точности в 1% достаточно таймера с частотой 15 кГц. Частота MCU составляет 16 МГц, поэтому между прерываниями будет 1000 циклов процессора, этого достаточно для выполнения остальной части программы, поэтому можно смело настраивать таймер на заданную частоту.
Чтобы установить таймер на определенную частоту, не кратную тактовой частоте, используйте режим таймера CTC – Clear Timer on Compare (Очистить таймер при сравнении). В этом режиме таймер отсчитывает время до заданного числа и сбрасывается, после чего операция повторяется. Число для сопоставления рассчитывается по формуле
Число = тактовая частота МК / делитель таймера / выбранная частота
Частота выбрана, теперь нужно перевести таблицу в тики таймера. Я сделаю это снова в Python
На этом расчеты заканчиваются, теперь остается только отзеркалить таблицу для другой половины формы сигнала и загрузить ее в MCU. Затем по прерыванию синхроимпульса нам нужно подать низкий уровень на управляющий пин симистора, запустить таймер и посчитать его переполнения (сходимость, так как у нас режим CTC). Как только количество переполнений достигнет желаемого числа из таблицы, подайте высокий уровень на управляющий пин. Вот как в итоге получается линейный регулятор напряжения переменного тока!
Заключение
Надеюсь, эта статья была понятна и интересна для чтения. Кроме того, я хотел бы сказать, что сигнал пересечения нуля не приходит идеально вовремя, поэтому для исправления этого может потребоваться дополнительная коррекция.
Расчетный код на языке python
Также, если кому-то будет интересно, я могу поделиться исходным кодом готового контроллера для arduino.
Вы находитесь здесь: Не так часто требуется знать точную частоту переменного тока по сравнению с такими величинами, как напряжение и сила тока. Например, для измерения тока можно использовать клеммметр, при этом вам даже не придется прикасаться к проводящим частям, а для проверки напряжения подойдет любой циферблатный или цифровой мультиметр.
Точная настройка преобразователя частоты
Каждый преобразователь частоты имеет ряд настроек, которые позволяют задать правильное ускорение и замедление двигателя. В этой статье мы расскажем, какие параметры можно контролировать и как их оптимизировать, чтобы избежать выхода оборудования из строя.
Основные параметры для ускорения/замедления двигателя
Минимальная выходная частота. Этот параметр определяет значение частоты, при которой двигатель начинает вращаться. Более высокая минимальная частота часто уменьшает нагрев двигателя при ускорении.
Нижний предел выходной частоты. Этот параметр ограничивает частоту на выходе преобразователя. Нижний предел не должен быть ниже минимальной выходной частоты. Эта настройка необходима для защиты двигателя и оборудования в случае неправильной установки минимальной рабочей частоты.
Максимальная выходная частота. Этот параметр ограничивает выходную частоту сверху. Установленное (номинальное) значение частоты может быть меньше или равно максимальной выходной частоте. Это значение используется для расчета теоретического времени запуска, а также связано с максимальным значением управляющих сигналов на аналоговых входах.
Максимальная частота напряжения (номинальная частота двигателя). Этот параметр устанавливается в соответствии со значением, указанным на заводской табличке двигателя. Обычно это 50 Гц. На этой частоте на двигатель подается максимально возможное для преобразователя напряжение. Если это значение слишком мало, двигатель перегружен и никогда не будет работать на номинальной частоте.
время ускорения. Это основной параметр, определяющий расчетное время, необходимое для разгона двигателя от нуля до максимальной выходной частоты. Темп нарастания ускорения обычно линейный, если не задано квадратичное изменение частоты. Если темп нарастания установлен в промежуточном диапазоне (не от нуля и до максимальной частоты), фактическое время будет меньше установленного. Это следует учитывать при проектировании оборудования.
Например, если минимальная выходная частота равна нулю, а максимальная – 50 Гц, установка времени разгона 10 с и максимальной выходной частоты 25 Гц уменьшит фактическое время разгона вдвое, т.е. на 5 с. То же самое относится и к торможению.
Инерция нагрузки
На фактическое время ускорения и замедления также влияют различные механические и электрические параметры системы привода. Например, если заданы очень короткие времена ускорения и замедления, фактическое время может быть больше из-за инерции нагрузки на валу двигателя.
Инерция нагрузки при разгоне может привести к перегрузке по току и ошибке частотного преобразователя. Чтобы предотвратить это, время разгона должно быть выбрано в соответствии с несколькими критериями. Если этот параметр не важен, его можно установить на автоматическое ускорение. В этом случае инвертор выбирает максимальную скорость ускорения или замедления, чтобы избежать ошибки перегрузки по току (ускорение) или перенапряжения в звене постоянного тока (замедление).
Когда время торможения должно быть как можно короче, используются тормозные резисторы для высвобождения “избыточной” энергии, генерируемой при торможении.
Дополнительная инерция при ускорении и замедлении может возникать и при аналоговой настройке выходной частоты. Это происходит, когда на аналоговом входе установлен фильтр низких частот для уменьшения шума или когда установлен аналоговый опорный сигнал с высокой инерционностью.
Производители рекомендуют ограничить количество пусков/остановок двигателя в единицу времени, поскольку ускорение и замедление вызывают наибольшую тепловую нагрузку на преобразователь частоты.
Многие преобразователи частоты имеют несколько времен ускорения и замедления, которые могут применяться для различных этапов процесса. Переключение происходит через сигнал на соответствующим образом запрограммированный двоичный вход.
Параметры на примере преобразователя частоты Prostar PR6100
В преобразователе частоты Prostar PR6100 параметры настройки ускорения/замедления находятся в меню и обозначаются следующим образом:
- P0.06 – верхний предел частоты
- P0.07 – нижний предел частоты
- P0.14 – время ускорения
- P0.15 – время замедления
- P1.03 – номинальная частота двигателя
Дополнительная полезная информация:
Использование тормозных резисторов с ПЧ
Использование сетевых и моторных дросселей
Настройка преобразователя частоты для работы с несколькими двигателями
Назначение и типы энкодеров
При установке и использовании бустеров, независимо от их типа, необходимо соблюдать основные правила безопасности. Основными из них являются:
Повышение – частоты – переменного тока
Увеличение частоты переменного тока уменьшает сопротивление первичной обмотки для измерения потерь. [2]
По мере увеличения частоты переменного тока при том же значении амплитуды переменного тока сопротивление резистора увеличивается. Объясните, какое явление ответственно за это и от каких свойств проводников оно зависит. [3]
По мере увеличения частоты переменного тока проницаемость начинает уменьшаться, а потери увеличиваться. [4]
При увеличении частоты переменного тока опасность возрастает в диапазоне частот от 30 до 100 Гц. По мере дальнейшего увеличения частоты реакция организма замедляется, и раздражитель постепенно заменяется тепловым эффектом, который нагревает внешнюю поверхность тела. При частотах 200 кГц и выше электротравма возможна только в виде ожогов. [5]
С увеличением частоты переменного тока петля характеристики (рис. 236) увеличивается во всех своих точках. [6]
С увеличением частоты переменного тока, когда период переменного поля соизмерим со временем релаксации t, диэлектрическая проницаемость уменьшается. [7]
Поскольку влияние диэлектрической проводимости при измерении емкости уменьшается с увеличением частоты переменного тока, целесообразно измерять значения Cx на высоких частотах. Для этого был использован Q-метр типа КВ-1, с помощью которого резонансным методом можно измерить значение Cx в диапазоне от 50 кгц до 50 мгц. [8]
Было замечено, что увеличение частоты переменного тока, используемого для измерения, приводит к уменьшению емкости. На частотах в несколько тысяч герц емкость почти перестает зависеть от частоты и достигает нормального значения емкости двойного слоя. На низких частотах в течение одного полупериода большая часть электрической энергии расходуется на реакцию адсорбционного слоя водорода на платине с последующим его удалением и переносом ионов водорода обратно в раствор. Однако при высокой частоте переменного тока относительно медленный разряд и реакция образования ионов водорода не успевают произойти, и количество протекающей электрической энергии становится намного меньше, поскольку она вызывает только изменение состояния ионов в двойном слое, но не реакцию окисления-восстановления водорода. [9]
Было замечено, что увеличение частоты переменного тока, используемого для измерения, приводит к уменьшению емкости. На частотах в несколько тысяч герц емкость почти перестает зависеть от частоты и достигает нормального значения емкости двойного слоя. При низких частотах большая часть электрической энергии расходуется в течение одного полупериода на реакцию формирования адсорбционного слоя водорода на платине с последующим его удалением и переносом ионов водорода обратно в раствор. Однако при высокой частоте переменного тока относительно медленный разряд и реакция образования ионов водорода не успевают произойти, и количество протекающей электрической энергии становится намного меньше, поскольку она вызывает только изменение состояния ионов в двойном слое, но не реакцию окисления-восстановления водорода. [10]
Было замечено, что увеличение частоты переменного тока, используемого для измерения, приводит к уменьшению емкости. На частотах в несколько тысяч герц емкость почти перестает зависеть от частоты и достигает нормального значения емкости двойного слоя. При низких частотах в течение одного полупериода значительная часть электрической энергии расходуется на реакцию образования адсорбционного слоя водорода на платине с последующим его удалением и переносом ионов водорода обратно в раствор. Однако при высоких частотах переменного тока относительно медленный разряд и реакция образования ионов водорода не успевают произойти, и количество протекающей электрической энергии становится намного меньше, поскольку она вызывает только изменение состояния ионов в двойном слое, но не реакцию окисления-восстановления водорода. [11]
Известно, что с увеличением частоты переменного тока увеличивается неравномерность его распределения в поперечном сечении проводника. [12]
Уменьшение индуктивности провода с увеличением частоты передаваемого переменного тока связано с уменьшением внутренней индуктивности провода, определяемой отношением внутреннего (внутри провода) магнитного потока к току, протекающему по проводу. С другой стороны, внешняя индуктивность, определяемая отношением внешнего (вне провода) магнитного потока к току в проводе, не зависит от частоты. [14]
Читайте далее:- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Топливные элементы/.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Строение атома водорода (H), схема и примеры.
- Асинхронный электродвигатель – конструкция, принцип работы, типы асинхронных двигателей.
- Выбор преобразователей частоты, диапазон регулирования частоты.