ГОСТ гласит, что для прерывистого режима работы электродвигателя продолжительность цикла не должна превышать…
Тест. Тест по “Основам электропривода”

Режим работы электродвигателя, при котором периоды работы с постоянной номинальной нагрузкой перемежаются с периодами останова машины; периоды нагрузки (периоды работы) короткие и избыточная температура не достигает устойчивого состояния, а периоды останова позволяют двигателю остыть до температуры окружающей среды, называется…
Варианты ответов
- краткосрочный
- прерывистый
- долгосрочный
Вопрос 13
Режим работы электродвигателя, при котором периоды постоянной номинальной нагрузки (периоды работы) перемежаются с периодами отключения машины (перерывы), когда и периоды работы, и перерывы не являются достаточно продолжительными, чтобы избыточная температура достигла значений, установленных как для нагрева, так и для охлаждения, называется…
Варианты ответов
- долгосрочный
- краткосрочный
- неоднократно – краткосрочный
Вопрос 14
Государственный стандарт устанавливает, что при многократно переменном режиме работы электродвигателя продолжительность цикла не должна превышать …
Варианты ответов
- 5 мин
- 15 мин
- 20 мин
- 10 мин
Вопрос 15
Промышленность выпускает электродвигатели со стандартным сроком службы …
Варианты ответов
- 20, 40, 70 и 100 мин.
- 15, 30, 60 и 90 мин.
- 5, 15, 25 и 50 мин.
- 1, 3, 5 и 9 мин.
Вопрос 16
В каком режиме работают электроприводы кранов, лифтов и подъемников?
Варианты ответов
- Непрерывная работа
- В прерывистом режиме работы
- Краткосрочная эксплуатация
Вопрос 17
Разработаны электроприводы для разводных мостов, служебных замков:
Варианты ответов
- При непрерывной работе
- В режиме многократного повторения последовательности
- В краткосрочном режиме
Вопрос 18
В каком режиме привода двигатель должен быть рассчитан на максимальную мощность?
Варианты ответов
- Непрерывная работа
- Непрерывная работа в прерывистом режиме
- Прерывистая работа
Вопрос 19
Непрерывная работа электропривода не характерна для …
Привод – это устройство, которое перемещает рабочую часть на основе сигнала, поступающего от привода. Приводами могут быть заслонки, клапаны, затворы, поворотные затворы. Они изменяют количество вещества, поступающего в объект.
С развитием промышленного производства электроприводы стали лидером в бытовом и промышленном применении по количеству электродвигателей и общей мощности. Рассмотрите конструкцию, типы, классификацию приводов и требования.
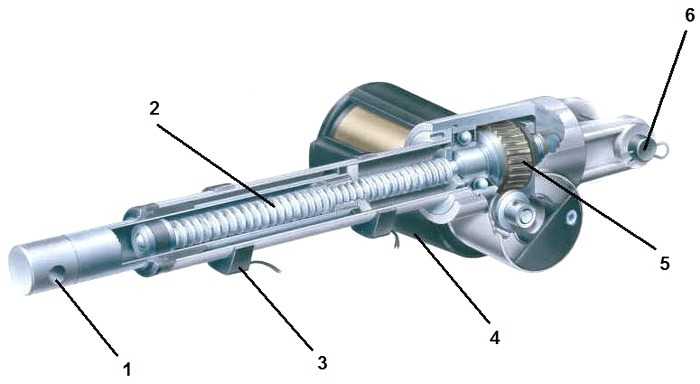
1 – Переднее крепление
2 – Винтовая передача
3 – Концевой передатчик
4 – Электрический двигатель
5 – Коробка передач
6 – Задний кронштейн
Функциональные части
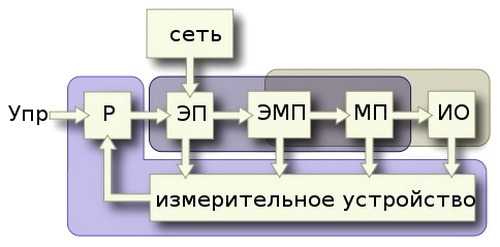
- Р – Контроллер служит для управления исполнительным механизмом.
- EA – это электрический преобразователь, который преобразует электрическую энергию в регулируемое напряжение.
- ЭМП – это электромеханический преобразователь, который преобразует электрическую энергию в механическую.
- MF – Механический преобразователь способен изменять скорость и характер движения двигателя.
- управление – контрольные мероприятия.
- IO – является исполнительным элементом.
Функциональные части
- Привод.
- Механическая часть.
- Система управления.
Привод – это устройство, которое перемещает рабочую часть по сигналу от механизма управления. Рабочими частями могут быть задвижки, клапаны, затворы, заслонки. Они изменяют количество вещества, поступающего в объект.
Рабочие элементы могут двигаться постепенно, вращаясь в определенных пределах. Они используются для воздействия на объект. Большинство приводов состоят из электрического привода, зубчатых колес, датчиков положения и блока обратной связи.
Сегодня электроприводы модернизируются с целью снижения их веса, повышения эффективности, экономичности, долговечности и надежности.
Характеристики привода
- Статический . Механические и электромеханические характеристики.
- Механическая . Это взаимосвязь между скоростью и моментом сопротивления. Механические характеристики полезны и удобны при анализе динамических режимов.
- Электромеханические . . Это зависимость скорости от силы тока.
- Динамичный . Это зависимость координат исполнительного механизма в определенный момент времени во время переходного состояния.
Классификация
Электрические приводы обычно классифицируются в соответствии с различными параметрами и характеристиками, которые им приписываются. Рассмотрим основные из них.
В зависимости от типа движения:
- Ротари.
- Прогрессивный.
- Реверсивный.
- Ротари.
В соответствии с принципом регулирования:
- Нерегулируемый.
- Регулируемый.
- Контролируется.
- Программное обеспечение контролируется.
- Адаптивный. Автоматически генерирует оптимальный режим работы при изменении условий.
- Положение.
Зависит от типа передающего устройства:
- Оснащен.
- Без коробки передач.
- Электрогидравлический.
- Магнитогидродинамический.
По типу преобразователя:
- Управление воротами. Инвертор – это транзистор или тиристор.
- Выпрямитель-двигатель. Инвертор – это выпрямитель напряжения.
- Инверторный двигатель. Инвертор – это двигатель с частотным регулированием.
- Генератор-двигатель.
- Магнитный усилитель-двигатель.
В зависимости от способа передачи энергии:
- Группа . Один двигатель используется для привода других приводов рабочих машин через редуктор. Этот тип привода имеет очень сложную кинематическую цепь. Электрические приводы такого типа неэкономичны из-за сложности эксплуатации и автоматизации. Поэтому данный тип привода не нашел широкого применения.
- Индивидуально . Он характеризуется тем, что каждый привод имеет свой отдельный электродвигатель. Этот тип привода является одним из самых современных приводов, поскольку его кинематическая передача проста, а условия обслуживания и автоматизации оптимизированы. Индивидуальные приводы становятся все более популярными в современных машинах, таких как сложные станки, роботы и подъемное оборудование.
- Комбинированный . Этот тип привода имеет несколько сопряженных приводов. Их действие поддерживает соотношение скорости и нагрузки, а также положение органов машины. Сопряженные электроприводы необходимы по технологическим и конструктивным причинам. Примерами могут служить привод конвейерной ленты, поворотный механизм экскаватора или трансмиссия мощного винтового пресса. Для достижения постоянного соотношения скоростей без механической связи используется электрическая связь нескольких двигателей. Это известно как электрическая цепь вала. Этот тип привода используется в сложных станках и разводных мостах.
В зависимости от уровня автоматизации:
- Автоматизированный.
- Автоматизированный.
- Автоматическая.
По типу тока:
- Постоянный ток.
- Переменный ток.
По важности эксплуатации:
- Главный привод.
- Вспомогательный привод.
Выбор электродвигателя
Для того чтобы приводы выполняли качественную работу, необходимо правильно подобрать электродвигатель. Это создает условия для длительной и надежной работы и повышает эффективность производства.
При выборе электродвигателя для привода ваших агрегатов полезно придерживаться нескольких рекомендаций:
- Требования технологического процесса позволяют выбрать двигатель с подходящими характеристиками, конструкцией и способом монтажа и установки.
- Из экономических соображений выбирайте двигатель, который надежен, экономичен и прост, имеет низкие эксплуатационные расходы, малый вес, низкую стоимость и небольшие размеры.
- При выборе подходящего двигателя учитываются соображения экологии и безопасности.
Правильный выбор двигателя определяет технико-экономические характеристики всего привода, его надежность и длительный срок службы.
Преимущества
- Более точное определение мощности двигателя для электропривода.
- Электродвигатель менее опасен в плане пожара, чем другие типы двигателей.
- Приводы обеспечивают быстрый запуск и остановку механизма и его плавное торможение.
- Для электродвигателя нет необходимости в специальных регуляторах мощности. Все процессы происходят автоматически.
- Цилиндры позволяют выбрать двигатель, свойства которого лучше соответствуют характеристикам машины, чем у других моделей.
- Скорость машины можно плавно регулировать в определенных пределах с помощью электропривода.
- Электродвигатель может преодолевать высокие и длительные перегрузки.
- Электрический двигатель обеспечивает максимальную скорость и эффективность рабочего механизма.
- Электромотор позволяет экономить электроэнергию и при определенных условиях даже вырабатывать ее в сети.
- Полная и простая автоматизация систем и механизмов возможна только при использовании электроприводов.
- Эффективность электродвигателей самая высокая по сравнению с другими моделями двигателей.
- Двигатели изготавливаются с повышенной балансировкой. В результате они могут быть интегрированы в механизмы машин, что делает фундаменты менее громоздкими.
Инновационные электроприводы полностью автоматизированы. Системы управления приводами дают возможность рационально проектировать процессы, повышать производительность и эффективность, оптимизировать качество продукции и снижать затраты.
Технические требования
Ко всем техническим средствам и машинам предъявляются особые технические требования. Электрические приводы не являются исключением. Давайте рассмотрим некоторые из их основных требований.
Надежность
Это означает, что электропривод должен быть способен выполнять определенную функцию в заданных условиях в течение определенного интервала времени с некорректируемой вероятностью срабатывания.
Если эти требования не выполняются, то остальные свойства становятся бесполезными. Надежность может значительно варьироваться в зависимости от характера работы. Некоторые механизмы не требуют длительного времени работы, но механизм не должен выходить из строя. Такой пример можно найти в военной промышленности. И другой пример, где все наоборот, срок службы должен быть большим, но выход из строя устройства вполне возможен, и не вызовет серьезных последствий.
Точность
Это требование касается отклонений от заданных значений. Они не должны превышать допустимых значений. Приводы должны быть способны перемещать заготовку на определенный угол или за определенное время и поддерживать скорость, ускорение или крутящий момент на определенном уровне.
Быстрое реагирование .
Эта особенность привода позволяет быстро реагировать на различные управляющие воздействия. Скорость реакции связана с точностью.
Качество
Эта характеристика обеспечивает качество переходных процессов, реализацию определенных закономерностей при их выполнении. Требования к качеству вытекают из характеристик машин с электрическим приводом.
Энергоэффективность
Все производственные процессы преобразования и передачи имеют потери энергии. Это качество стало наиболее важным при применении электроприводов к механизмам, приводов с высокой мощностью и длительным временем работы. Энергоэффективность определяется коэффициентом полезного действия.
Совместимость
Электроприводы должны быть совместимы с работой аппарата, в котором они используются, его энергосистемой, информационными данными и рабочими элементами. Наибольшую озабоченность вызывает совместимость электроприводов в медицинских и бытовых приборах и в радиотехнике.
72 Динамическая разность координат привода: Максимальная разница между мгновенными и конечными значениями координат исполнительного механизма, возникающая при переходе из одного статического состояния в другое.
ОБЩИЕ ИЗМЕРЕНИЯ
1 электрический привод: Электромеханическая система, состоящая в основном из взаимодействующих преобразователей электрической энергии, электромеханических и механических преобразователей, управляющих и информационных устройств, а также устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных механизмов рабочей машины и управления этим движением с целью осуществления технологического процесса
de elektrischer Antrieb
электрический привод
2 преобразователь электрической энергииисточник электрической энергии, электрический преобразователь: электрическое устройство, преобразующее электрическую энергию одного набора параметров и/или параметров качества в электрическую энергию другого набора параметров и/или параметров качества.
Примечание. Преобразование параметров может быть выполнено по виду тока, напряжения, частоты, количеству фаз, фазе напряжения ГОСТ 18311
3 двигатель (электрический) (электропривод): Электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.
Примечание. В некоторых режимах работы электропривода электродвигатель преобразует энергию
электрический двигатель
4 Механическая передача (электропривод): Механический преобразователь, предназначенный для передачи механической энергии от двигателя к исполнительным механизмам рабочей машины и согласования типа и скорости их движения
5 Устройство управления (исполнительный механизм): Устройство, используемое для создания управляющего воздействия в электрическом приводе
устройство управления
6 информационное устройство (исполнительный механизм): Устройство, предназначенное для приема, преобразования, хранения, распространения и вывода информации о переменных привода, процессах и смежных системах для использования в системе управления приводом и внешних информационных системах
7 Интерфейсное устройство (электропривод): Совокупность электрических и механических компонентов, обеспечивающих взаимодействие привода со смежными системами и отдельными частями привода
8 Система управления электроприводом: Набор управляющих, информационных и интерфейсных устройств исполнительного механизма, предназначенных для управления электромеханическим преобразованием энергии для обеспечения определенного движения исполнительного механизма рабочей машины.
de Steuerungssystem des Elektroantrieb
система управления
9 Система управления для электрического привода: Система управления более высокого уровня, внешняя по отношению к приводу, которая предоставляет информацию, необходимую для работы привода.
ТИПЫ ЭЛЕКТРОПРИВОДОВ В ЗАВИСИМОСТИ ОТ ИХ НАЗНАЧЕНИЯ
10 Электрический поворотный привод: Электрические приводы, которые перемещают привод машины в направлении вращения.
de Antrieb Drehbewegung
en поворотный привод
11 Электрический привод линейного перемещения: Электрический привод, выполняющий линейное поступательное движение подвижных частей машины.
de Antrieb geradlinige Bewegung
en привод линейного перемещения
12 Электрический привод для возвратно-поступательного [вибрационного] движения: Электропривод, выполняющий возвратно-поступательное [вибрационное] движение машины, передающей электропривод.
13 Привод непрерывного движения: Электрический привод, который осуществляет непрерывное движение конечного элемента управления рабочей машины
14 Дискретный привод движения: Привод, который движется непрерывно: Электропривод для дискретного перемещения исполнительного механизма рабочей машины
15 динамометрический привод: Электрический привод, который подает определенный крутящий момент или усилие на конечный элемент управления приводимой машины
моментный привод
16 позиционный привод: Электрический привод, который перемещает и позиционирует исполнительный механизм приводимой машины в определенное положение.
17 реверсивный привод: Электрический привод, который перемещает исполнительный механизм приводимой машины в любом направлении
18 необратимый привод: Электрический привод, который перемещает исполнительный механизм приводимой машины только в одном направлении.
19 электропривод с регулируемой скоростью: Электропривод, выполняющий управляемое перемещение исполнительного механизма машины
de drehzahlgeregelter Antrieb
регулируемый привод с управлением en
20 неуправляемый привод: Электропривод, не обеспечивающий управляемого изменения координат движения исполнительного элемента рабочей машины
de nicht regelbarer Antrieb
21 Многоскоростной привод: Электрические приводы, которые перемещают исполнительный механизм машины с одной из двух или более фиксированных скоростей
en многоскоростной привод
22 многоскоростной электропривод: Электропривод, который перемещает исполнительный механизм машины в двух или более пространственных координатах.
23 согласованный привод движения: Электропривод, выполняющий согласованное перемещение двух или более концевых органов управления приводимой в движение машины
24 главный привод: Электропривод, осуществляющий перемещение конечного управляющего элемента рабочей машины, выполняющей основную технологическую операцию.
25 вспомогательный привод: Электропривод: электропривод, обеспечивающий перемещение исполнительного органа рабочей машины, выполняющей вспомогательную технологическую операцию.
en вспомогательный привод
26 Сервопривод: Привод, который перемещает исполнительный механизм машины в соответствии с произвольно изменяющимися опорными сигналами.
27 электропривод с электрическим управлением: Электропривод, который перемещает исполнительный механизм машины в соответствии с сохраненной программой
de programmgesteuerter Antrieb
программируемый электропривод
28 адаптивный привод: Электропривод, который автоматически выбирает собственную структуру и/или параметры системы управления при изменении возмущающего воздействия.
29 частотно-регулируемый привод: Электрический привод, который работает при заранее заданном изменении одного или нескольких показателей энергии.
30 Неавтоматизированный электропривод: Привод, в котором все операции управления выполняются человеком-оператором.
неавтоматизированный привод
31 автоматический привод: Электрический привод, в котором часть операций управления выполняется соответствующими устройствами управления без вмешательства оператора.
автоматизированный привод
ТИПЫ ЭЛЕКТРИЧЕСКИХ ПРИВОДОВ ПО ФИЗИЧЕСКИМ ПРИНЦИПАМ
ПРЕОБРАЗОВАНИЕ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В МЕХАНИЧЕСКУЮ
32 электромеханический привод: Электропривод, в котором преобразование электрической энергии в механическую осуществляется электрическими машинами, основанными на взаимодействии электромагнитных полей и проводников с током.
de elektromotorischer Antrieb
33 электромагнитный привод: Электропривод, в котором преобразование электрической энергии в механическую осуществляется устройством, основанным на взаимодействии электромагнитных полей и ферромагнитных тел
de elektromagnetischer Antrieb
34 Электростатический привод: Электропривод, в котором преобразование электрической энергии в механическую осуществляется устройством, основанным на взаимодействии электростатического поля и электрического заряда
35 Пьезоэлектрический [магнитострикционный] привод: Электропривод, в котором преобразование электрической энергии в механическую осуществляется устройством, основанным на пьезоэлектрическом [магнитострикционном] эффекте.
36 Открытый [закрытый] привод управления: Привод с открытым [закрытым] регулированием: Электропривод, который не [включает] обратную связь по координате управляемого привода или возмущения, влияющие на управляющее устройство
de Antrieb mit offenem [geschlossenem] Steuerungssystem
управление в замкнутом контуре
37 электрический вал: Взаимосвязанная система электропривода, которая синхронизирует два или более центрально расположенных, немеханически связанных исполнительных механизмов приводимой машины.
de elektrische Welle
38 Редукторный [безредукторный] электропривод: Редукторный [безредукторный] электропривод
редукторный [прямой] привод
39 Электрический привод с маховиком: Электрический привод вращательного движения, механическая передача которого включает маховик
привод маховика
40 дифференциальный привод: Многодвигательный привод, в котором скорость и крутящий момент на исполнительном механизме приводимой машины суммируются алгебраически с помощью механического дифференциала
дифференциальный привод
41 групповой дискгрупповой привод: привод с одним электродвигателем, который перемещает привод нескольких рабочих машин или перемещает несколько приводов одной рабочей машины
42 индивидуальный привод: Электропривод, который перемещает один исполнительный механизм рабочей машины
43 комбинированный привод: Два или более электрически или механически связанных исполнительных механизма, которые действуют таким образом, чтобы поддерживать определенное соотношение между их скоростями и/или нагрузками и/или положениями на рабочих элементах рабочего оборудования
44 Мультиактуатор: Привод, состоящий из нескольких электродвигателей, механически взаимодействующих друг с другом через привод приводимой машины
en многодвигательный привод
45 Электрический каскад: Привод с регулируемой скоростью с асинхронным двигателем с фазированным ротором, в котором энергия скольжения возвращается в электросеть
система Креймера
46 Электромеханический каскад: Привод с переменной скоростью с асинхронным двигателем с фазированным ротором, в котором энергия скольжения преобразуется в механическую энергию и передается на вал этого двигателя.
47 Электропривод с общим преобразователем: Электропривод, преобразователь которого питает два или более двигателя
48 Электропривод с общим суммирующим усилителем: Привод с регулируемой скоростью, в котором сигналы управления и обратной связи регулируемых координат привода суммируются на одном общем усилителе.
49 Электропривод с подчиненным управлением координатами: Управляемый привод, в котором контроллеры соединены последовательно для формирования замкнутой системы управления, в которой выходной сигнал внешнего контроллера является входным сигналом внутреннего ведомого контроллера.
50 Аналоговый преобразовательный привод: Привод, в котором выходные координаты преобразователя мощности принимают любое значение от нуля до максимально допустимого.
51 Электрический релейный привод: Привод, в котором выходные координаты силового преобразователя принимают два или три фиксированных значения.
52 Электропривод с импульсным преобразователем: Электропривод, силовой преобразователь которого периодически включает и выключает напряжение, подаваемое на электродвигатель, с регулируемой скоростью или изменяет параметры электрической цепи электродвигателя
53 Инверторный электропривод тока [напряжения]: Привод переменного тока, преобразователь мощности которого включает инвертор тока [напряжения]
54 Электропривод с источником тока: Приводы, в которых преобразователь имеет характеристики источника тока
ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ ЭЛЕКТРИЧЕСКИХ ПРИВОДОВ
55 Привод постоянного [переменного] тока: Электрические приводы, состоящие из электродвигателя постоянного тока [переменного тока].
de Gleichstromantrieb [Wechselstromantrieb].
56 Электрооборудование со взрывозащитой: Электрооборудование специального назначения, которое сконструировано таким образом, что возможность воспламенения взрывоопасной атмосферы вокруг него исключена или затруднена при эксплуатации данного изделия* ГОСТ 18311
* Электрооборудование относится к электрооборудованию, входящему в состав привода.
57 Привод двигателя клапана: –
58 система генератор-двигатель [“статический преобразователь-двигатель”]: Электропривод с электромашинным преобразователем [статический преобразователь-двигатель].
59 Электропривод с электромеханическим преобразователем: Электропривод, включающий устройство, объединяющее электромеханический преобразователь с электронными компонентами для управления, диагностики и защиты
60 Тиристорный преобразователь: Привод, включающий тиристорный преобразователь
en [thyristor drive].
61 Электропривод с релейно-контактным [бесконтактным] управлением: Приводы, имеющие устройство управления на основе релейно-контактных [бесконтактных] устройств управления.
62 Электрический привод с силовыми резисторами: Электропривод, управление координатами которого осуществляется путем изменения сопротивления резисторов, включенных в цепь питания электродвигателя
63 Электропривод с жесткой программой: Привод, в котором используются средства управления, делающие невозможным изменение программы без изменения аппаратного обеспечения и структуры привода.
de Antrieb mit Festprogramm
64 Привод с тормозным устройством [с регулируемым сцеплением]: Привод, механическая передача которого включает тормозное устройство [управляемое сцепление].
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЭЛЕКТРОПРИВОДА
65 Координата привода: Любая электрическая, механическая, магнитная, тепловая переменная, используемая для описания состояния исполнительного механизма и управления его состоянием
66 приводной элемент (актуатор): Одна из движущихся частей механической части привода, обычно вал двигателя, с которой связаны значения параметров и переменных всех остальных элементов.
67 номинальная скорость привода: Скорость приводного элемента привода при номинальном статическом моменте или усилии*.
* Здесь и далее: “крутящий момент” для вращательного двигателя; “сила” для поступательного двигателя.
68 Скорость холостого хода привода: Скорость приводного элемента актуатора, когда крутящий момент или сила равны нулю.
69 Схема конструкции одномассового привода: конструктивная схема механической части электропривода, представленная приводным элементом с моментом инерции, равным сумме приведенных моментов инерции и масс всех подвижных частей механической части электропривода
70 схема многомассового электропривода: Конструктивная схема механической части электропривода, представленного двумя или более приводными элементами
71 Разность координат статического привода: Разность двух значений координат привода, соответствующих двум значениям статического режима
72 Разность координат динамического привода: Максимальная разница между мгновенными и конечными значениями координат исполнительного механизма, возникающая при его переходе из одного статического режима в другой.
73 Электромеханическая постоянная времени привода: Отношение момента инерции привода к статической жесткости его механической реакции.
механическая постоянная времени
74 Момент инерции привода: Сумма моментов инерции всех движущихся масс электропривода при приведении к скорости движущего элемента.
момент инерции
75 Динамический крутящий момент [сила] привода: Момент [сила], приложенный к элементу привода, равный разности моментов [сил] электродвигателя и статической нагрузки
76 Тепловая мощность электропривода: Зависимость крутящего момента или силы статической нагрузки от времени, допустимая в условиях нагрева ограничивающего элемента электропривода при заданных условиях охлаждения
de Termische Belastbarkeit des Antrieb
77 Статическая жесткость механического поведения привода: Отношение разности моментов или сил, соответствующих двум статическим режимам, к разности скоростей электропривода в этих режимах, когда механическая реакция электропривода линеаризована в данном разделе
78 Настройка диапазона регулировки координат привода: Отношение средних максимальных и минимальных значений регулируемой координаты электропривода в заданном диапазоне изменения возмущающих воздействий
79 Плавность управления координатами электропривода: Отношение разности между двумя соседними значениями координаты привода к ее номинальному значению
80 Точность управления координатами электропривода: Отношение изменения управляющей координаты электропривода при изменении возмущения в заданном диапазоне к его среднему значению.
81 Средневзвешенная эффективность привода: Отношение полезной механической работы привода рабочей машины за данный интервал времени и потребленной за тот же интервал времени электрической энергии
82 Динамическая жесткость механических характеристик привода: Передаточная функция, связывающая крутящий момент и скорость электродвигателя привода
83 Механическая реакция привода: Взаимосвязь между скоростью и крутящим моментом или силой приводного элемента исполнительного механизма
84 Электромеханический отклик электропривода: Связь между скоростью двигателя привода и током якоря.
85 Статический режим работы привода: Режим работы электропривода, при котором значение основной координаты электропривода, обычно скорости, является постоянным.
86 Режим работы динамического привода: Режим работы электропривода, при котором изменяется значение первичной координаты электропривода.
87 Динамическая реакция привода: Связь между мгновенными значениями двух координат привода для одного и того же крутящего момента в переходном режиме работы электропривода
88 переходный режим работы электропривода*: Средство перехода из одного состояния установившегося режима работы электрического аппарата в другое ГОСТ 18311
* Под электрическим оборудованием здесь понимается электрическое оборудование, входящее в состав привода.
89 устойчивая работа электрооборудования*: Режим работы электрооборудования, при котором значения всех рабочих параметров практически постоянны или изменяются периодически ГОСТ 18311
* Под электрическим устройством здесь понимается электрическое устройство, являющееся частью исполнительного механизма.
90 Рабочая частота электропривода – это допустимая частота нагрева электропривода: Частота последовательных пусков и остановок электропривода, при которых температура двигателя не превышает допустимую.
Преобразователь предназначен для управления потоком электрической энергии из сети для управления режимами работы двигателей и машин. Это энергетическая часть системы управления приводом.
Что такое электропривод
 Машина состоит из трех основных частей: двигателя, редуктора и привода. Для того чтобы обрабатывающая машина выполняла свои функции, ее исполнительные механизмы должны совершать вполне определенные движения, которые выполняются исполнительным механизмом.
Машина состоит из трех основных частей: двигателя, редуктора и привода. Для того чтобы обрабатывающая машина выполняла свои функции, ее исполнительные механизмы должны совершать вполне определенные движения, которые выполняются исполнительным механизмом.
В общем, привод может быть ручным, конным, механическим, а также от ветряка, водяного колеса, паровой или газовой турбины, двигателя внутреннего сгорания, пневматическим, гидравлическим или электрическим. Привод является основным структурным элементом любой технологической машины, и его основная функция заключается в обеспечении требуемого движения исполнительного механизма машины в соответствии с заданным законом. Современную технологическую машину можно представить как совокупность взаимодействующих приводов, соединенных системой управления, которая обеспечивает требуемое движение исполнительного органа по сложным траекториям.
В процессе развития промышленного производства электропривод занял первое место в промышленности и быту по количеству и общей мощности установленных двигателей. В каждом электроприводе можно выделить силовую часть, которая передает энергию от двигателя к приводу, и систему управления, которая обеспечивает требуемое движение привода по определенному закону.
Определение электрического привода уточнялось и расширялось с развитием технологий, как с точки зрения механики, так и систем управления. В книге “Применение электродвигателей в промышленности”, опубликованной в 1935 году В. К. Поповым, профессором Ленинградского индустриального института. K. Попов дал следующее определение регулируемого электропривода: “Регулируемый двигатель и привод – это двигатель, в котором мы можем изменять скорость независимо от нагрузки.

Расширение областей применения и функций электроприводов в комплексной автоматизации производственных процессов потребовало уточнения и расширения понятия “электропривод”. На 3-й конференции по автоматизации производственных процессов в машиностроении и автоматизированному электроприводу в промышленности, состоявшейся в Москве в мае 1959 года, было использовано следующее определение: “Электропривод – это сложное устройство, преобразующее электрическую энергию в механическую и обеспечивающее электрическое управление преобразованной механической энергией”.
В 1960 году С.И. Артоболевский в своей работе “Привод – основной конструктивный элемент машины” констатировал, что изучению приводов как сложных систем, состоящих из двигателя, передаточного механизма и исполнительного механизма, не уделялось должного внимания. Теория электропривода изучает условия работы электродвигателя без учета передаточного механизма и вспомогательных органов, а теоретическая механика изучает передаточные устройства и исполнительные механизмы без учета влияния электродвигателя.
В 1974 году М.Г. Чиликин и другие авторы в своем учебнике “Основы автоматизированного электропривода” дали следующее определение: “Электропривод – это электромеханическое устройство для электрификации и автоматизации производственных процессов, состоящее из преобразователя, электродвигателя, редуктора и устройств управления.
От передаточного устройства механическая энергия передается непосредственно к исполнительному или рабочему органу производственного механизма. Электропривод преобразует электрическую энергию в механическую и обеспечивает электрическое управление преобразованной энергией в соответствии с технологическими требованиями режимов работы производственного механизма.

В 1977 году в Политехническом словаре, изданном под редакцией академика И.И. Артоболевского, дано следующее определение: “Электропривод – это электромеханическое устройство для приведения в движение механизмов и машин, в котором источником механической энергии служит электродвигатель. Электропривод состоит из одного или нескольких электродвигателей, механизма передачи мощности и устройств управления.
Современные электроприводы характеризуются высокой степенью автоматизации, что позволяет им работать в наиболее экономичных режимах и с высокой точностью воспроизводить требуемые параметры движения исполнительного механизма машины. Поэтому в начале 1990-х годов концепция электропривода была распространена на область автоматизации.
В ГОСТ Р50369-92 “Электроприводы. Термины и определения” дает следующее определение: “Электропривод – электромеханическая система, состоящая в общем случае из взаимодействующих преобразователей электрической энергии, электромеханических и механических преобразователей, управляющих и информационных устройств, а также устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных механизмов рабочей машины и управления этим движением с целью осуществления технологического процесса”.

В учебнике В.И. В издании 2001 года “Теория электропривода” Ключева дается следующее определение электропривода как технического устройства: “Электропривод – электромеханическое устройство, предназначенное для привода рабочих органов машин и управления технологическими процессами, состоящее из устройства передачи энергии, устройства электродвигателя и устройства управления. Назначение и состав различных частей электропривода объясняются ниже.
Передаточное устройство содержит механические шестерни и муфты, необходимые для передачи механической энергии, вырабатываемой двигателем, на исполнительный механизм.
Преобразователь предназначен для управления потоком сетевого электричества для регулирования режимов работы двигателя и машины. Он является частью мощности системы управления приводом.
Блок управления – это слаботочная информационная часть системы управления, предназначенная для сбора и обработки поступающей информации об эталонных воздействиях, состоянии системы и формирования на основе этой информации управляющих сигналов на инверторные электродвигательные устройства.
В целом, термин “электропривод” может иметь две трактовки: электропривод как набор различных устройств и электропривод как область науки. В учебнике для вузов “Теория автоматического электропривода”, изданном в 1979 году, отмечалось, что “теория электропривода как самостоятельная наука родилась в нашей стране. Началом его зарождения можно считать 1880 год, когда в журнале “Электричество” была опубликована статья Д. А. Лачинова “Электромеханическая работа”, в которой впервые были обоснованы преимущества электрического распределения механической энергии.
В том же учебнике дается понятие электрической тяги как отрасли прикладной науки: “Теория электродвижения – техническая наука, изучающая общие свойства электромеханических систем, законы управления их движением и методы синтеза этих систем по определенным показателям”.
В настоящее время электрическая тяга является важной, быстро развивающейся областью науки и техники, занимающей ведущее место в электрификации и автоматизации промышленности и быта, а направление ее развития определяется расширением областей применения и возрастающими требованиями, предъявляемыми к электротехническим системам и комплексам.
Электрическая тяга обеспечивает энергетическую основу для индустриализации технологических процессов в промышленном производстве. Темпы его реализации высоки. Электроприводы потребляют более 60% всей вырабатываемой электроэнергии.
Совершенствование электроприводов в настоящее время ведется в направлении повышения их эффективности, надежности, экономичности, точности работы, снижения единичных и массогабаритных показателей отдельных устройств и электромеханических систем в целом. На всех этапах совершенствования электротехнологии достижение электроприводом требуемых параметров сопровождалось развитием его теоретической базы.
Если вам понравилась эта статья, пожалуйста, поделитесь ссылкой на нее в своих социальных сетях. Это поможет в развитии нашего сайта!
Привод обычно состоит из одного или нескольких электродвигателей и передаточного устройства – устройства, служащего для передачи механической энергии двигателя к рабочему органу приводимой машины. Наиболее распространенными приводами, используемыми в неконтролируемых приложениях, являются двигатели переменного тока, подключенные к источнику питания через контактор или выключатель, выполняющий функцию защитного устройства, или через штекерный разъем (например, в бытовых приборах). Скорость вращения ротора электродвигателя такого привода, а значит и скорость перемещения связанного с ним рабочего механизма, изменяется только в зависимости от нагрузки на привод. Асинхронные электродвигатели используются в мощных неуправляемых приводах. Для ограничения пусковых токов между двигателем и источником тока устанавливаются пусковые дроссели или автотрансформаторы, которые отключаются при запуске двигателя. В регулируемых приводах чаще всего используются двигатели постоянного тока, скорость которых можно плавно, т.е. непрерывно, изменять в широком диапазоне с помощью относительно простых устройств управления.
Основные типы электроприводов
По дизайну
- один
Одиночные приводы используются в ручных машинах, простых металло- и деревообрабатывающих станках и бытовых приборах.
- Групповой привод
Групповые приводы, или приводы трансмиссии, редко используются в современном производстве.
- многомоторный
Многомоторные – приводы для мультиинструментов, одномоторные – тяговые для рельсового транспорта.
По реверсивному
- реверсивный
- необратимый
управляемостью потока преобразованной механической энергии
- нерегулируемый
- регулируемые (в том числе автоматизированные с программируемым управлением и т.д.)
Основные части электроприводов
Приводы всех типов содержат две основные части с одинаковой функцией:
- исполнительная часть
- блок управления
Приводная часть Электрические приводы обычно состоят из одного или нескольких электродвигателей и передаточного механизма – устройства, служащего для передачи механической энергии двигателя рабочему органу приводимой машины. В неуправляемых приводах обычно используются электродвигатели переменного тока, которые подключаются к сети либо через контактор или автоматический выключатель, выполняющий функцию защитного устройства, либо через штепсельное соединение (например, в бытовой технике). Скорость вращения ротора электродвигателя такого привода, а значит и скорость движения связанного с ним рабочего механизма, изменяется только в зависимости от нагрузки на привод. Асинхронные электродвигатели используются в мощных неуправляемых приводах. Для ограничения пусковых токов между двигателем и источником устанавливаются пусковые дроссели или автотрансформаторы, которые отключаются при запуске двигателя. В регулируемых приложениях чаще всего используются двигатели постоянного тока, скорость которых можно плавно, т.е. непрерывно, изменять в широком диапазоне с помощью относительно простых устройств управления.
В блок управления включает в себя
- кнопочная панель (для запуска и остановки двигателя)
- вспомогательные контакты
- преобразователи напряжения
- устройства защиты от перегрузки в аварийных ситуациях.
При питании электропривода от источника переменного тока, применяемого в промышленности и в электромобилях, двигатели которых питаются от сети переменного тока, в качестве преобразующих устройств используются электрические машины или статические преобразователи-выпрямители. В случае питания постоянным током, что характерно для автономных энергосистем и электропоездов с приводом от двигателей постоянного тока, преобразователи проектируются как релейно-статорные системы или статические преобразователи. В 1970-х годах все большее распространение получили преобразователи, работающие на постоянном токе. В 20 веке в регулируемых электроприводах все чаще использовались трехфазные асинхронные и синхронные двигатели, режимы работы которых управляются статическими, в основном твердотельными, преобразователями. Электроприводы со статическими преобразователями энергии на основе ртутных или твердотельных клапанов называются вентильными приводами. Удельная мощность вентильных приводов переменного тока, используемых, например, в шахтных мельницах, достигает 10 МВт и более. Использование вентильных преобразователей обеспечивает наиболее экономичный способ возврата энергии от электродвигателя в сеть (см. рекуперативное торможение).
Важными параметрами, определяющими характеристики устройств управления регулируемыми электроприводами, являются плавность работы механизма управления, которая во многом зависит от плавности управления приводным двигателем, и реактивность. Релейно-контактные устройства управления при относительно низкой скорости обеспечивают ступенчатую (дискретную) регулировку режимов работы, быстродействующие статические системы – непрерывную регулировку. В простейших электроприводах относительно небольшой мощности операции, связанные с регулированием режима работы электропривода, выполняются с помощью ручного управления. Недостатком ручного управления является инерционность процесса управления и, как следствие, снижение эффективности исполнительного механизма, а также невозможность точного представления повторяющихся производственных процессов (например. частые запуски). Настройка режимов работы электропривода обычно осуществляется с помощью устройств автоматического управления. Этот тип приводов, называемый автоматическим приводом, широко используется в системах автоматического управления (САУ). В АСУ с разомкнутым контуром изменение возмущающего воздействия (например, нагрузки на вал электродвигателя) вызывает изменение заданного режима работы электропривода. В замкнутых системах управления вход и выход системы автоматически поддерживают заданную характеристику во всех режимах работы, которая также может быть отрегулирована по определенному закону. Компьютеры все чаще используются в этих системах. Одной из разновидностей автоматических приводов является сервопривод, в котором привод точно воспроизводит движения рабочего механизма, задаваемые приводом. Различают электрические сервоприводы с релейным или дискретным управлением и с непрерывным управлением. Следящие приводы характеризуются мощностью от нескольких ватт до десятков и сотен кВт и используются на различных промышленных предприятиях, в военной технике и т.д. В 1960-х годах различные области технологии нашли применение в следующих сферах. В 1920-х годах в различных областях техники нашли применение электроприводы с программным числовым управлением (ЧПУ). Эти типы электроприводов используются в многооперационных станках, автоматических и полуавтоматических линиях. Создание автоматизированного электропривода для выполнения отдельных операций и технологических процессов является основой для комплексной автоматизации производства. Для решения этой проблемы необходимо усовершенствовать данное устройство как в направлении увеличения диапазона мощности и управляемости, так и повышения надежности и создания электропривода с оптимальными габаритами и весом.
Замедление подъемной машины с асинхронным двигателем достигается механическим торможением при выключенном электродвигателе и с помощью электродвигателя. В последнем случае электродвигатель может использоваться для замедления двигателя и динамического торможения.
Электронная научная библиотека

6) Удобен для автоматического управления, надежен и безопасен в эксплуатации.
Этим требованиям в основном отвечают два типа электродвигателей: асинхронные двигатели с фазным ротором и двигатели постоянного тока с независимым возбуждением. Асинхронные электродвигатели широко применяются в приводах грузоподъемных машин малой и средней мощности до 1200 Вт и в двухдвигательных приводах общей мощностью до 2000 Вт, двигатели постоянного тока используются для приводов большой мощности – свыше 1000 Вт. Из-за потерь энергии в реостатах при управлении асинхронными двигателями более экономичным является использование двигателей постоянного тока большой мощности [1, 15, 16].
Подъемная машина с асинхронным двигателем замедляется механическим тормозом при выключенном двигателе и электродвигателем. В последнем случае электродвигатель может использоваться для моторного торможения и динамического торможения.
Замедление двигателя достигается путем введения резисторов в цепь ротора и используется, когда требуется небольшое усилие двигателя для расширения системы в свободном режиме.
Динамическое торможение достигается путем отключения статора от сети переменного тока и подачи на него постоянного тока. В статоре создается постоянное магнитное поле. Взаимодействие этого поля с магнитным полем, индуцированным в роторе, создает тормозной момент, которым можно управлять, изменяя постоянный ток и сопротивление реостата в цепи ротора.
Динамическое торможение позволяет контролировать скорость в широком диапазоне.
Как при моторном, так и при динамическом торможении механические тормоза применяются в конце.
Чаще всего используется первый способ управления замедлением асинхронного намоточного устройства – механическое торможение.
Скорость двигателя подъемника постоянного тока регулируется путем изменения напряжения, подаваемого на его якорь от преобразователя тока. В случае преобразователя G-D постоянный ток на якорь двигателя подъемника подается от генератора, электрический ток. которого зависит от тока в его обмотке возбуждения. В системе привода TP-D (тиристорный преобразователь – двигатель) постоянный ток на двигатель подается тиристорным преобразователем с устройством управления приводом.
Производительность двигателя намотчика обычно определяется в два этапа. На первом этапе производится грубый расчет мощности и выбор электродвигателя для определения момента инерции (необходимого для составления диаграмм усилий) и сравнения различных вариантов проектируемой лебедки. На втором этапе производится более точный расчет установленной мощности электродвигателя.
Приблизительная мощность электродвигателя определяется по формуле:
 (7.52)
(7.52)
где ρ – коэффициент, называемый в соответствии с терминологией, предложенной акад. М.М. При этом должны учитываться следующие значения: ηp – характеристика динамического режима Федорова, зависящая от момента инерции грузоподъемной машины, степени ее дисбаланса и множителя скорости α; K – коэффициент, учитывающий увеличение нагрузки за счет вредного сопротивления; ηp – коэффициент полезного действия передачи грузоподъемной машины.
Исходя из опыта проектирования, следует принимать следующие значения ρ для подъемных установок: с подъемными сосудами 1,3-1,4; с подъемными сосудами 1,4-1,5; с подъемными сосудами 1,5-1,6; с наклонными стойками 1,8-2,2 и для нескольких установок 1,2-1,3.
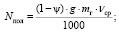
Мощность электродвигателя Nпол (без потерь), затраченная на подъем полезного груза массой mр со средней скоростью:
для установки на одном судне с противовесом
 (7.53)
(7.53)
для вертикальной установки с двумя емкостями
 (7.54)
(7.54)
где ψ – коэффициент, учитывающий степень сбалансированности массы mg с массой противовеса; vcf – средняя скорость судна, м/с:
 (7.55)
(7.55)
Окончательная мощность двигателя крана выбирается в соответствии с допустимым нагревом обмоток, и двигатель проверяется на перегрузочную способность при максимальных усилиях, возникающих в крановой установке. При переменных нагрузках на грузоподъемную машину мощность нагрева электродвигателя определяется эквивалентными силами. Эквивалентная сила F eq определяется как воображаемая постоянная сила, которая выделяет такое же количество тепла в двигателе в момент времени T eq, как и при работе двигателя с фактической переменной нагрузкой Fd за цикл подъема T:
 (7.56)
(7.56)
где kd и kp – коэффициенты, учитывающие ухудшение охлаждения электродвигателя во время переходных процессов и перерывов в работе, они имеют вид
kd = 0,6 – 0,7 и kp = 0,25 – 0,4; θ – интервал между циклами подъема, с.
В общем случае эквивалентная сила задается формулой
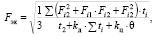 (7.57)
(7.57)
если mk ≠ m’k или балансировочный трос не используется, и
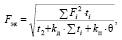 (7.58)
(7.58)
где Fi1 и Fi2 – движущая сила в начале и конце временного интервала ti, соответственно.
Для временных интервалов, когда электродвигатель отключен от сети, интегральные значения равны нулю.
КПД электродвигателя подъемной машины определяется эквивалентной силой Fec:
 (7.59)
(7.59)
где ηp – КПД редуктора подъемника.
Мощность двигателя принимается больше расчетной на 10-15 % с учетом возможного падения напряжения в электрической сети [1].
Выбранный электродвигатель проверяется на допустимую перегрузку.
 (7.60)
(7.60)
где γ – перегрузочная способность электродвигателей; Fd max – максимальное движущее усилие, определяемое по графику; Fn – номинальное усилие электродвигателя, определяемое его номинальным моментом и подаваемое на канатный обод движущего органа.
Определение энергопотребления и эффективности работы подъемной установки
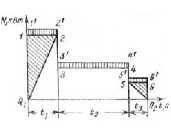
Рисунок 7.23: Схема питания,
Потребляемая мощность асинхронного электродвигателя
Потребляемая от сети мощность определяется по графикам мощности и зависит от типа двигателя. Диаграммы мощности (рис. 7.23) на валу органа с тросовым приводом строятся из диаграмм скоростей и сил по формуле для гибкого органа постоянного радиуса [1].
 (7.61)
(7.61)
Где Fi, i vi – сила, действующая на орган канатного привода и скорость движения судна в момент времени ti.
Потребляемая мощность Wc из сети за цикл равна площади графика потребляемой из сети мощности, кВтч:
 (7.62)
(7.62)
где n – количество периодов графика; Km – 1,03-1,05 – коэффициент, учитывающий расход энергии при маневрировании и торможении; Nicp – средняя мощность за i-й период графика, при линейном изменении мощности определяется как среднее значение мощности в начале Ni2 и в конце Nicp периода, Nicp = (Ni1 + Ni2)/2.
Потребление энергии Wt на тонну подъемного веса, кВтч:
 (7.63)
(7.63)
где Gg – грузоподъемность подъемного судна, т.
Расход энергии на 1 т-км при высоте подъема H:
 (7.64)
(7.64)
Годовое потребление электроэнергии Wr подъемной установки, кВтч:
где Qr – годовая мощность агрегата, t.
КПД подъемной установки определяется как отношение между полезной энергией, потребляемой за цикл, и энергией, забираемой из сети:
 (7.66)
(7.66)
Полезное потребление энергии за цикл в вертикальных двухбаковых подъемных установках, кВтч:
 (7.67)
(7.67)
КПД подъемной машины будет выше, чем у установки, так как она не учитывает сопротивление в валу и направляющих колесах.
 (7.68)
(7.68)
- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Кибернетика, что это такое? Происхождение и справочная информация.
- АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ it. Что такое система автоматического управления?.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Релейно-контактные системы управления – ЭЛЕКТРИЧЕСКИЙ ПРИВОД.
- Асинхронный электродвигатель – конструкция, принцип работы, типы асинхронных двигателей.